CHAPTER 01
戦場は物理空間から認知空間へ
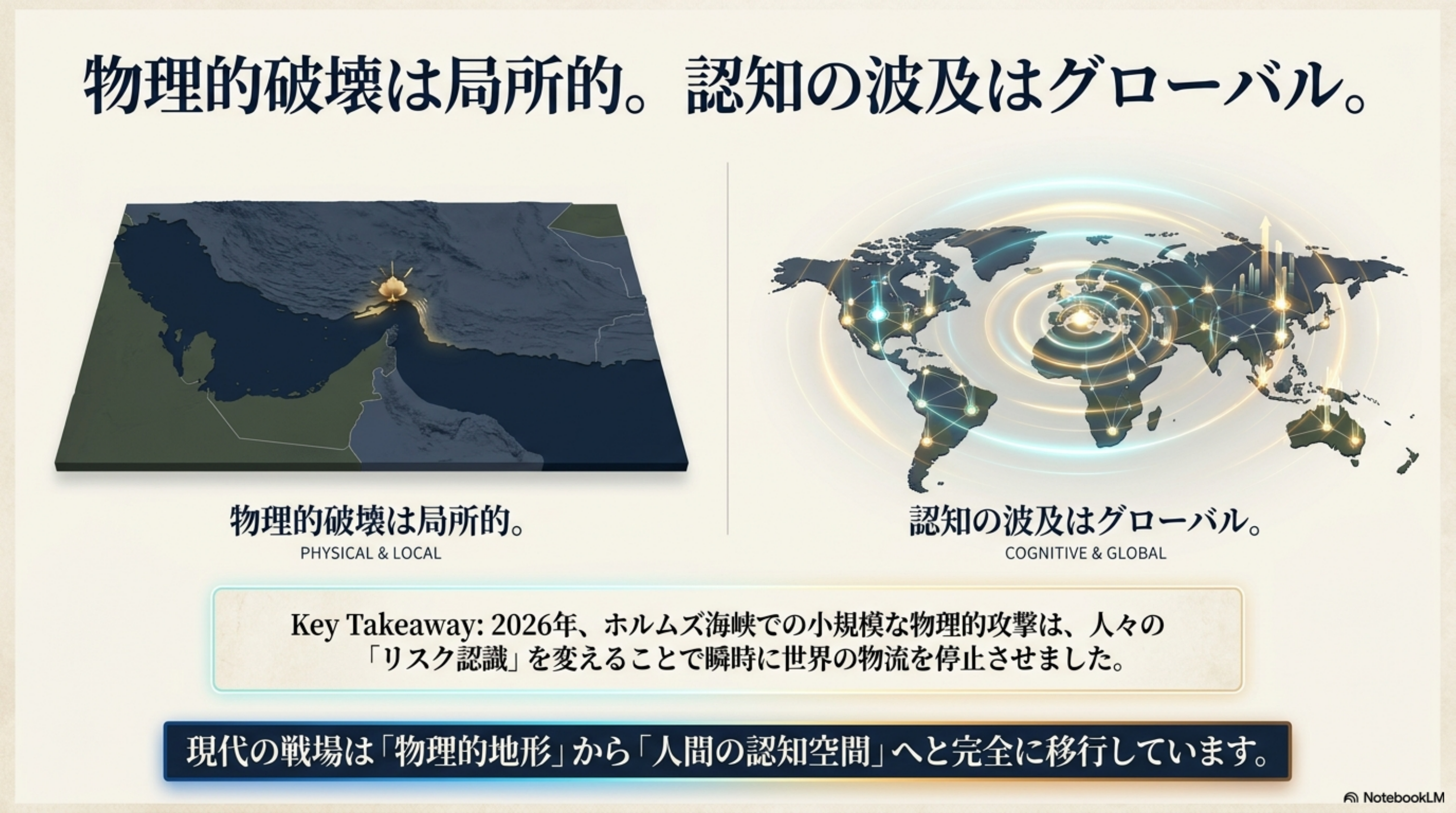
2026年、ホルムズ海峡での小規模な物理的攻撃は、人々の「リスク認識」を変えることで瞬時に世界の物流を停止させた。物理的破壊は局所的でも、認知の波及はグローバルに広がる。
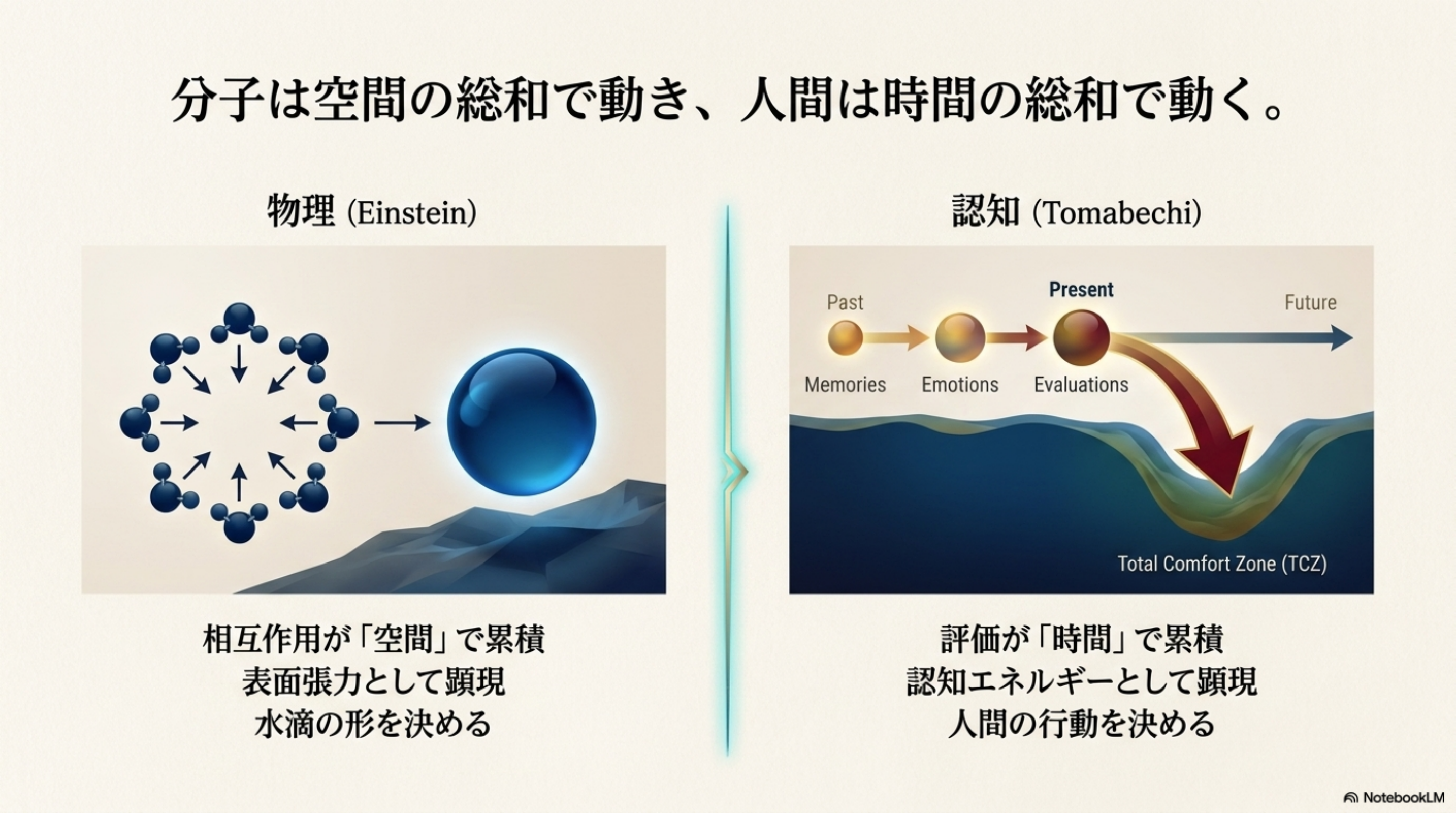
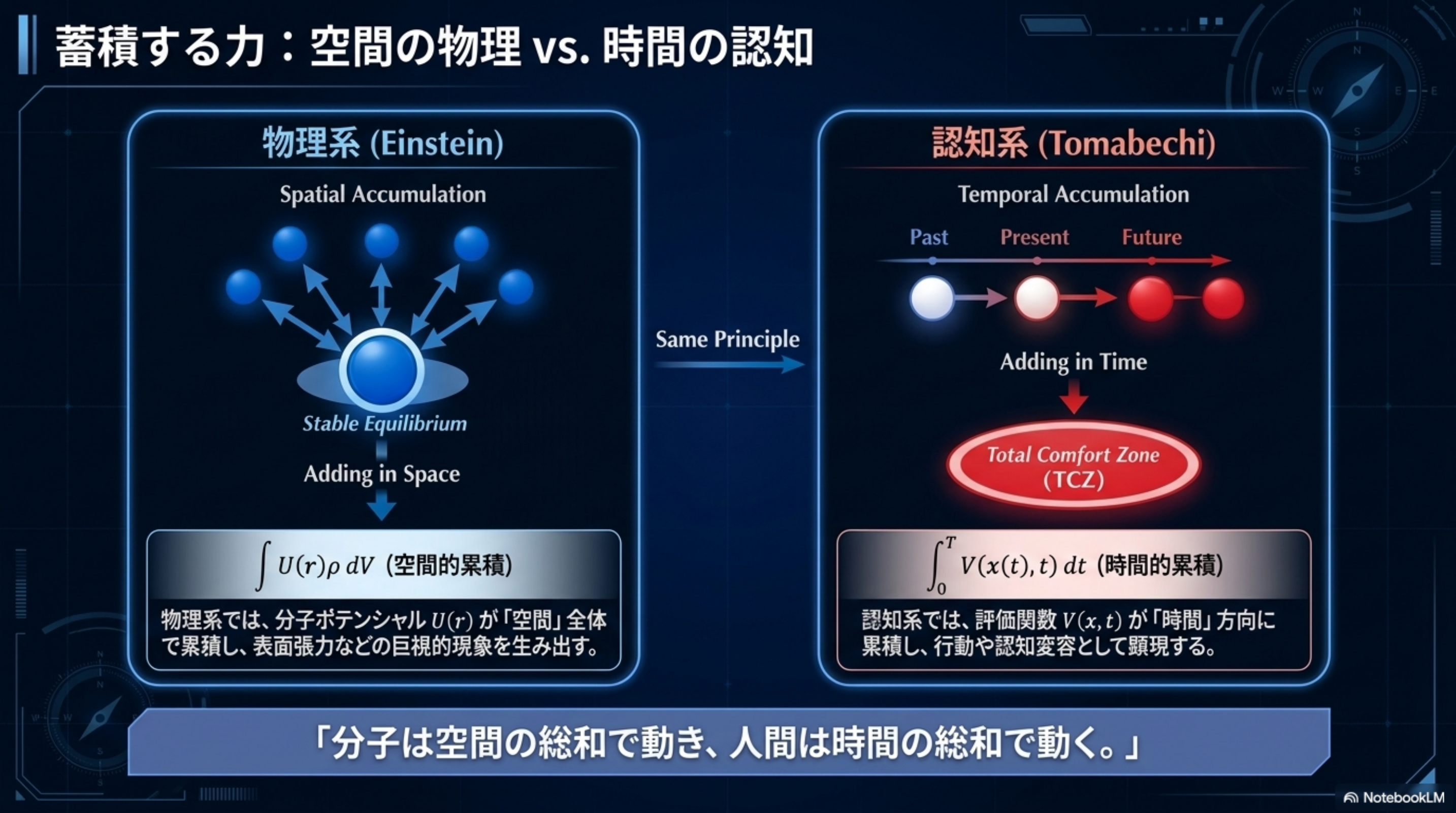
分子は空間の総和で動き、人間は時間の総和で動く。
苫米地英人による潜在ポテンシャル統一理論を、
3つのスライドデッキで直感的に読み解く。
同じ統一理論を、3つの画角で並べて見る。
詩的な物語、戦術的な解剖、学術的な構造 ── 角度が違えば、見える谷が違う。
暖色のメタファーで、心の地形を物語として語る入門編。Ego とは何か、TCZ とは何かを、波と光と球で。
暗色のタクティカル UI で、V(x,t) を解剖する。決定論を捨て、「内部の力学」をマスターキーとして握る。
クリーンな数理表現で、ホメオスタシスとアトラクター盆地を定義する。Einstein → 認知科学の同型性。
少なくとも 4 領域(個体・集団・抽象・臨場感)の動きが、たった 1 行の不等式に帰着することは すでに数学的に証明されている。残る 3 領域(バランス・コーチング・リーダーシップ)も同じ機構へ帰着するという 仮説が最前線で示されている(階層の詳細)。
下の表はその骨格を眺めるための 最初の 8 つの角度(T.0〜6B)。さらに真のゴール・未来原点の時間・達成・宇宙・象徴文化・進化へと続き、全体で 12 の定理 + 統一定理 T.0 が一本の木をかたちづくる。
哲学(記号論理)では Self ──「私は何者か?」
制御工学(力学系)では Ego ──「私はどう選ぶか?」
心理学(集合論)では TCZ ──「私はどこに居られるか?」
定理 1〜6B は、T.0 に異なる重み・異なる対象を加えた派生形にすぎない。8 定理は本定理を骨格として枝葉を伸ばした一本の木である(確定/仮説の階層)。
2026年、ホルムズ海峡での小規模な物理的攻撃は、人々の「リスク認識」を変えることで瞬時に世界の物流を停止させた。物理的破壊は局所的でも、認知の波及はグローバルに広がる。
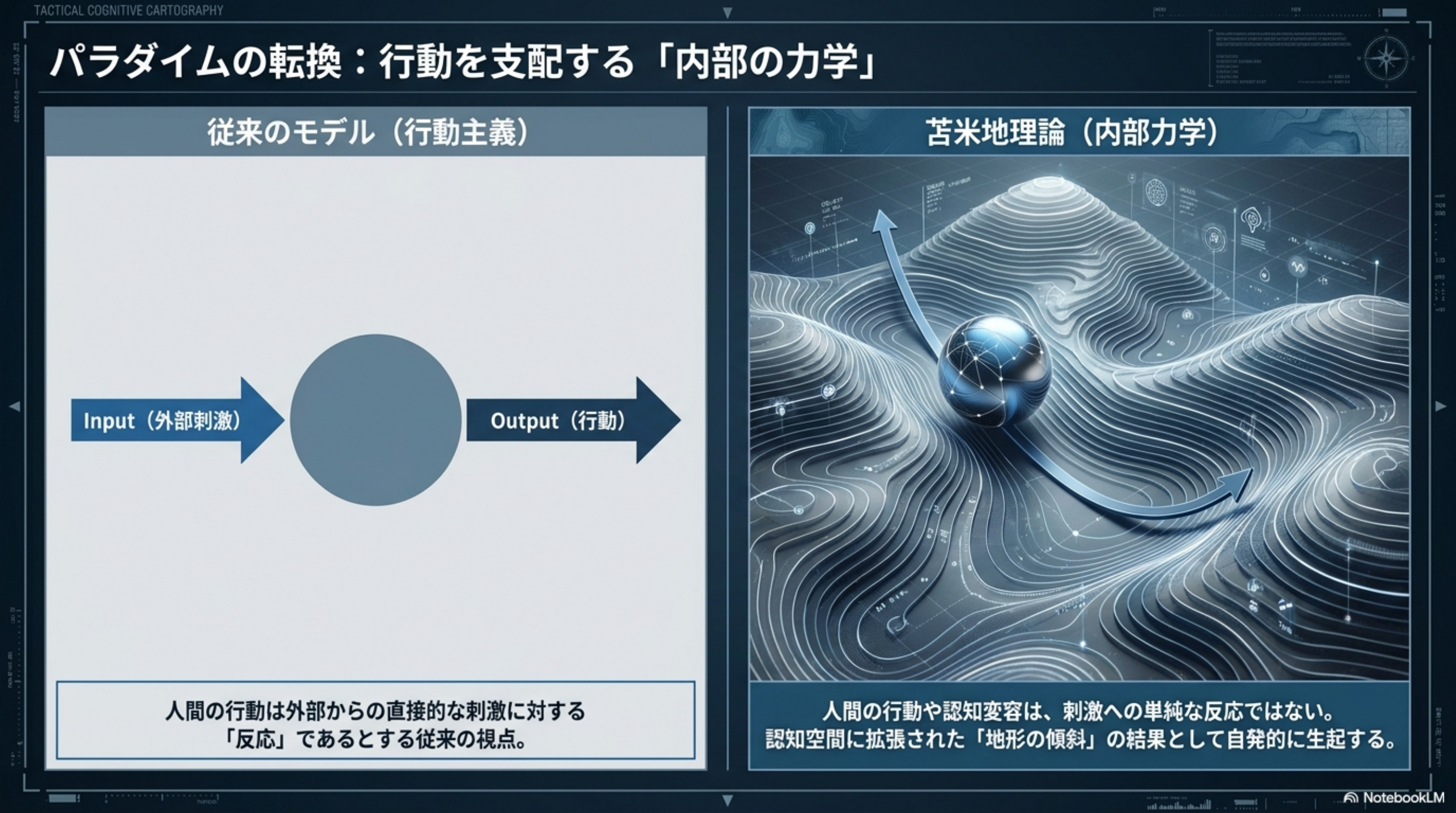
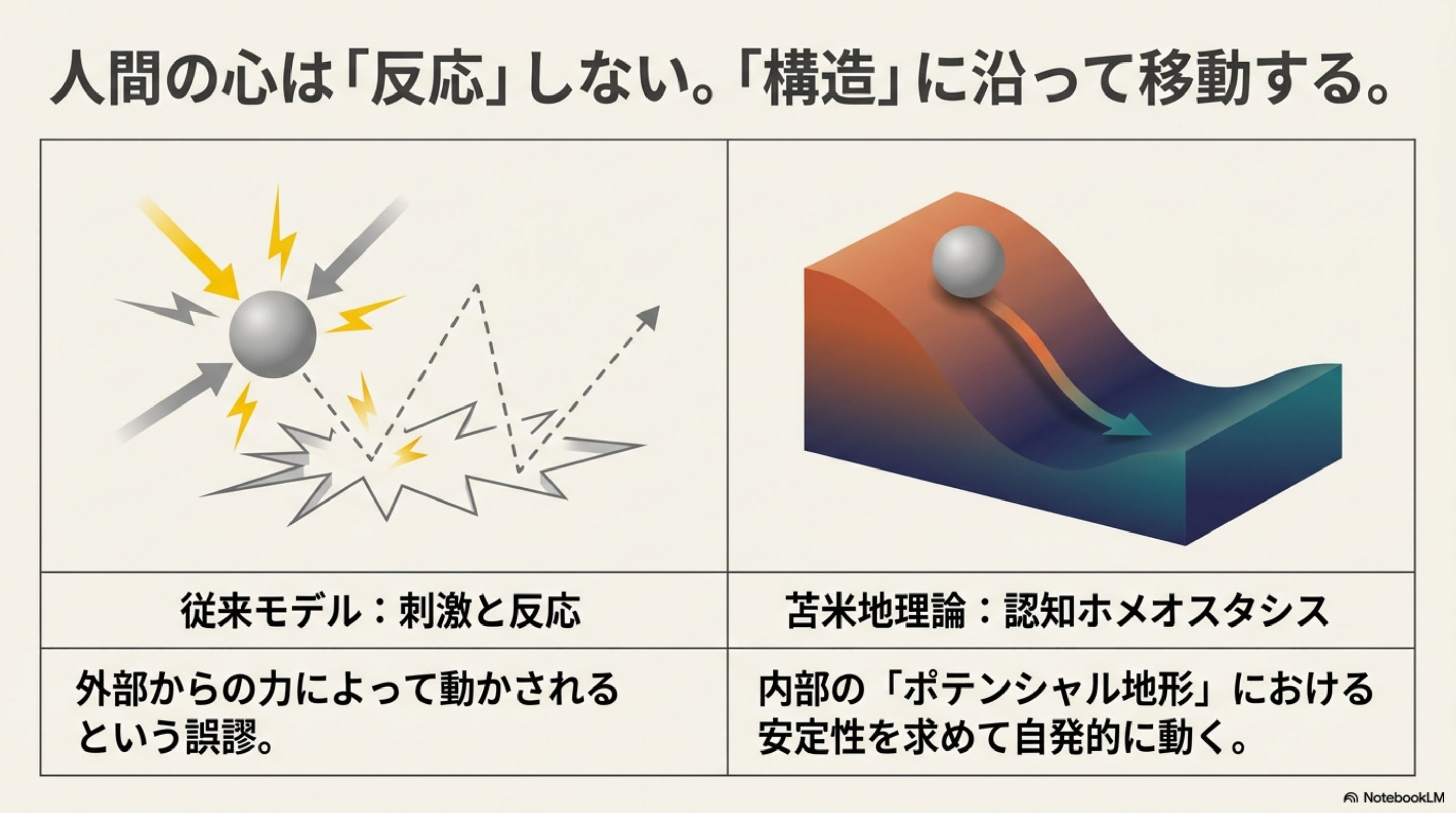
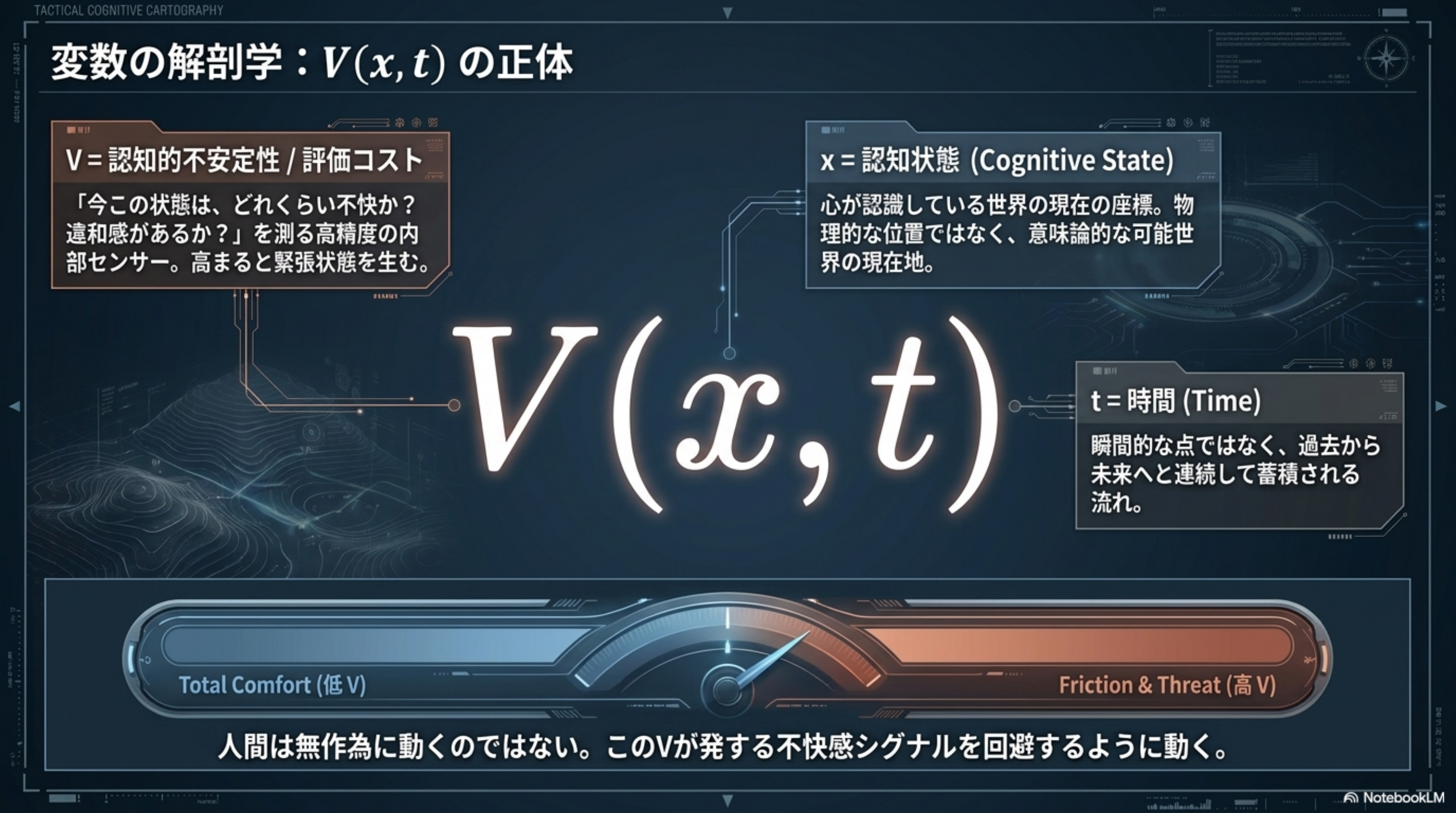
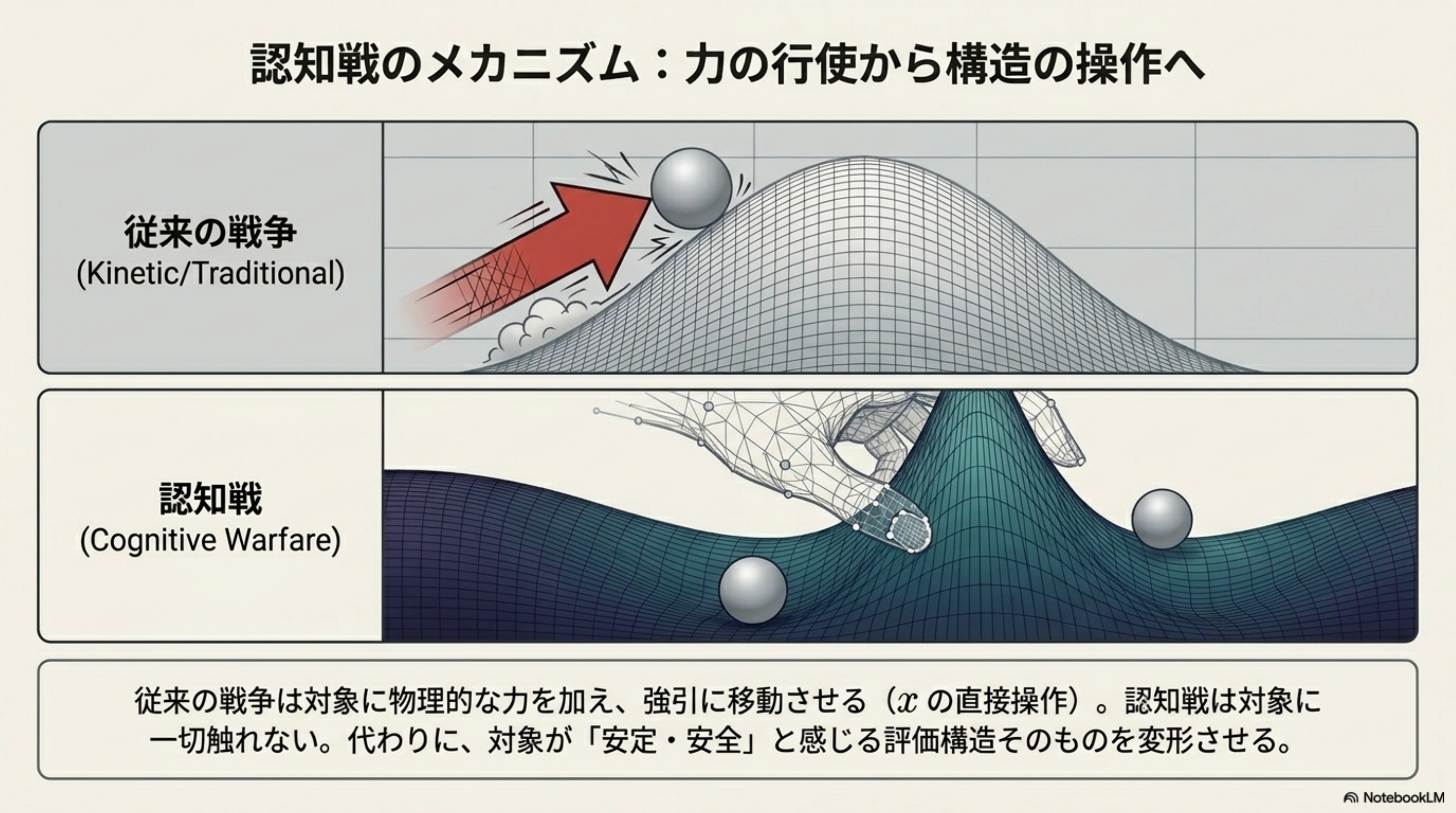
行動主義モデル(Input → Output)は誤りである。人間の行動は、認知空間に拡張された「ポテンシャル地形の傾斜」の結果として、自発的に生起する。
1901年、Einstein は分子ポテンシャル U(r) が空間で累積し表面張力を生むことを示した。同じ構造で、評価関数 V(x,t) は時間で累積し、人間の行動と TCZ を生み出す。
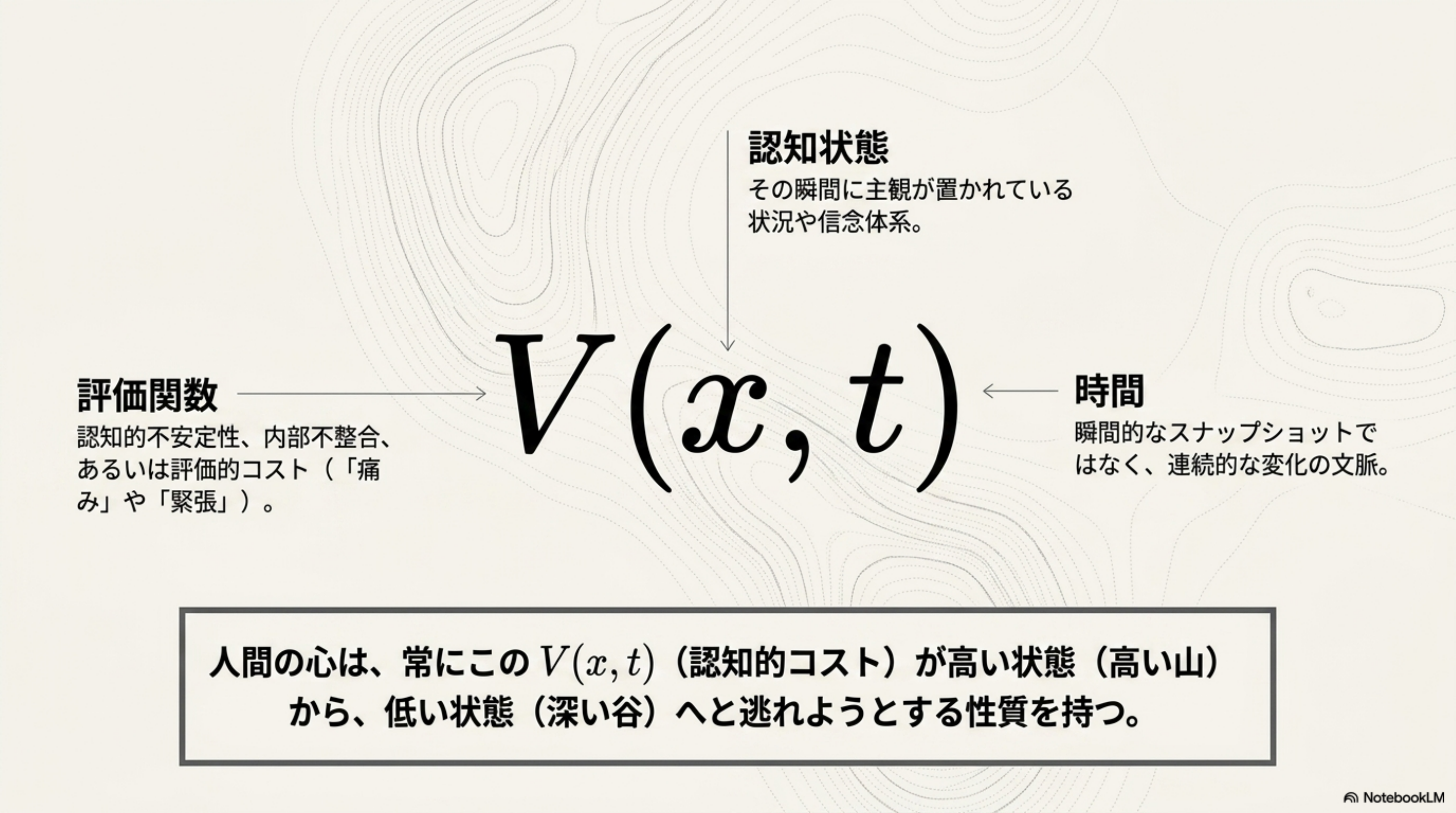
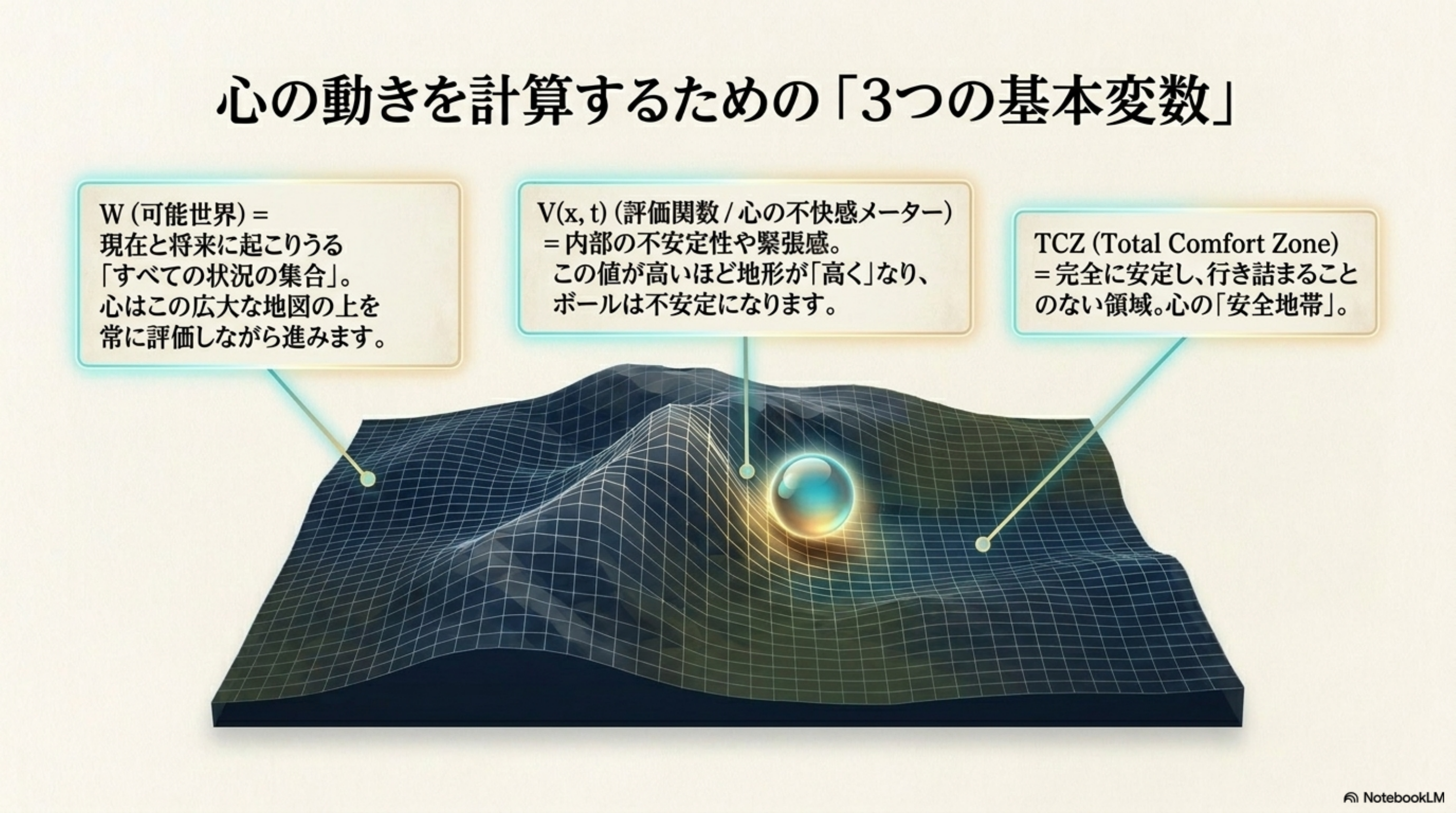
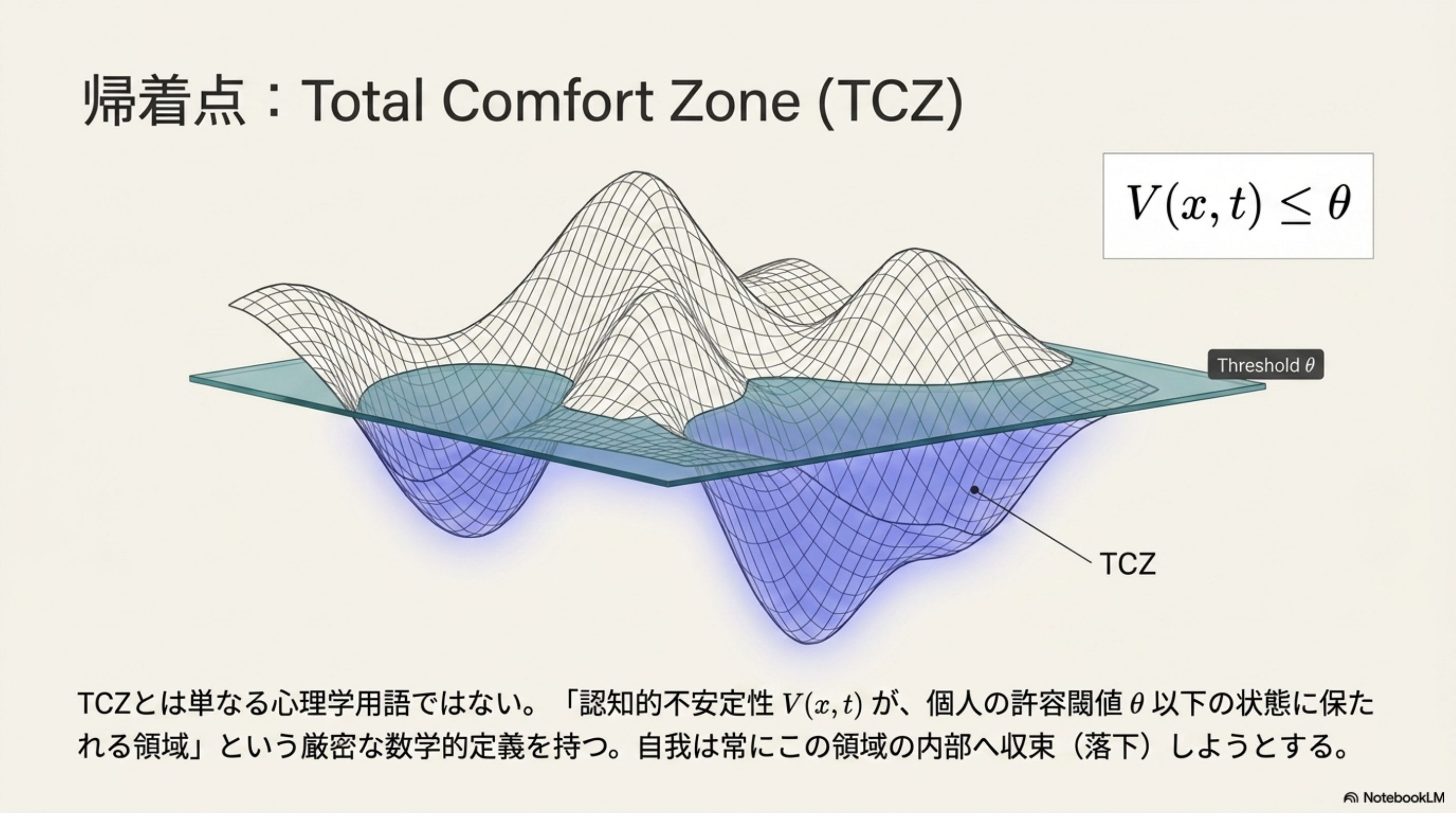
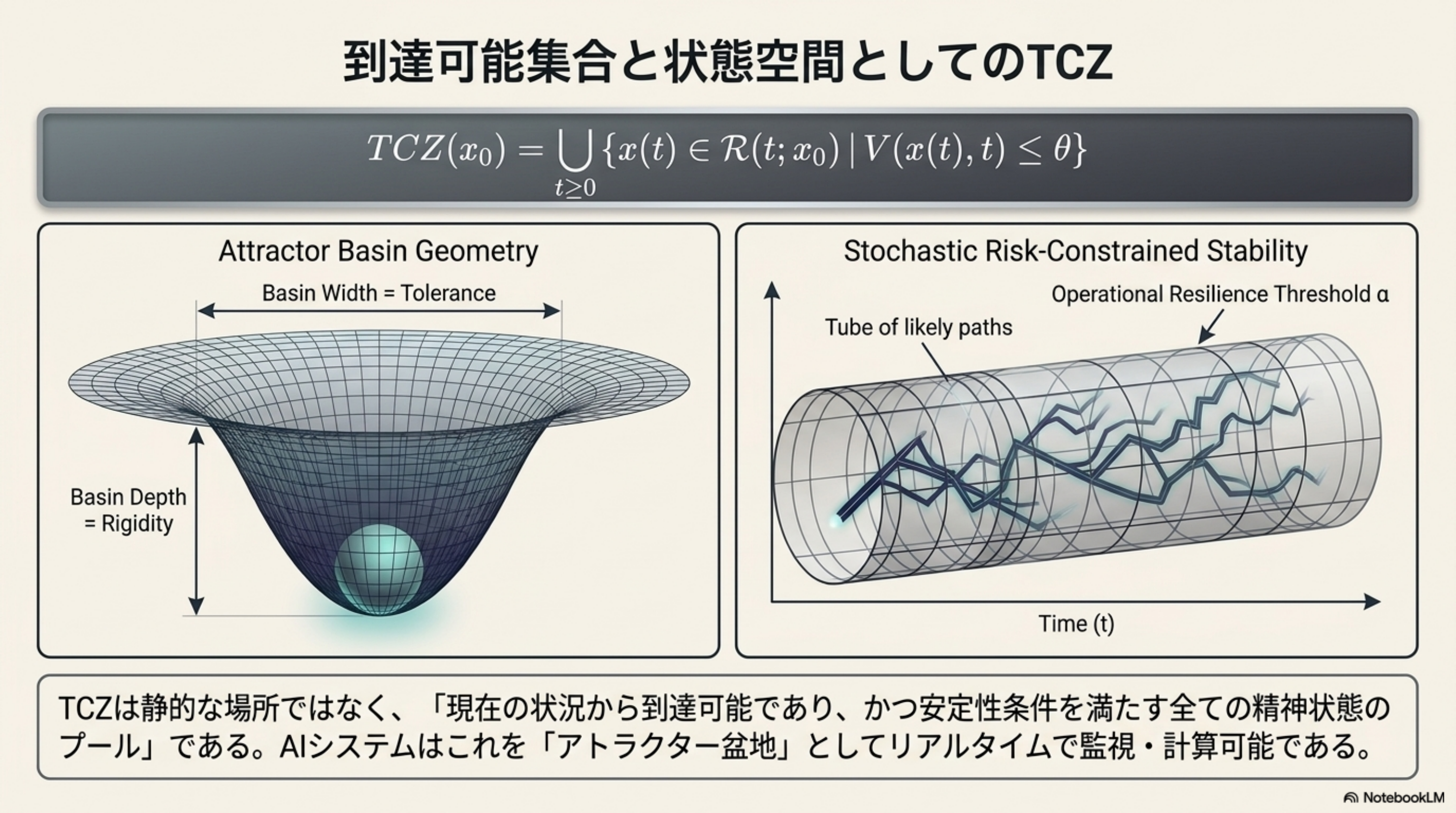
V(x,t) は、認知的不安定性 / 評価コストを測る高精度の内部センサー。x = 認知状態、t = 時間。この値が高いほど地形は「高く」なり、ボールは不安定になる。
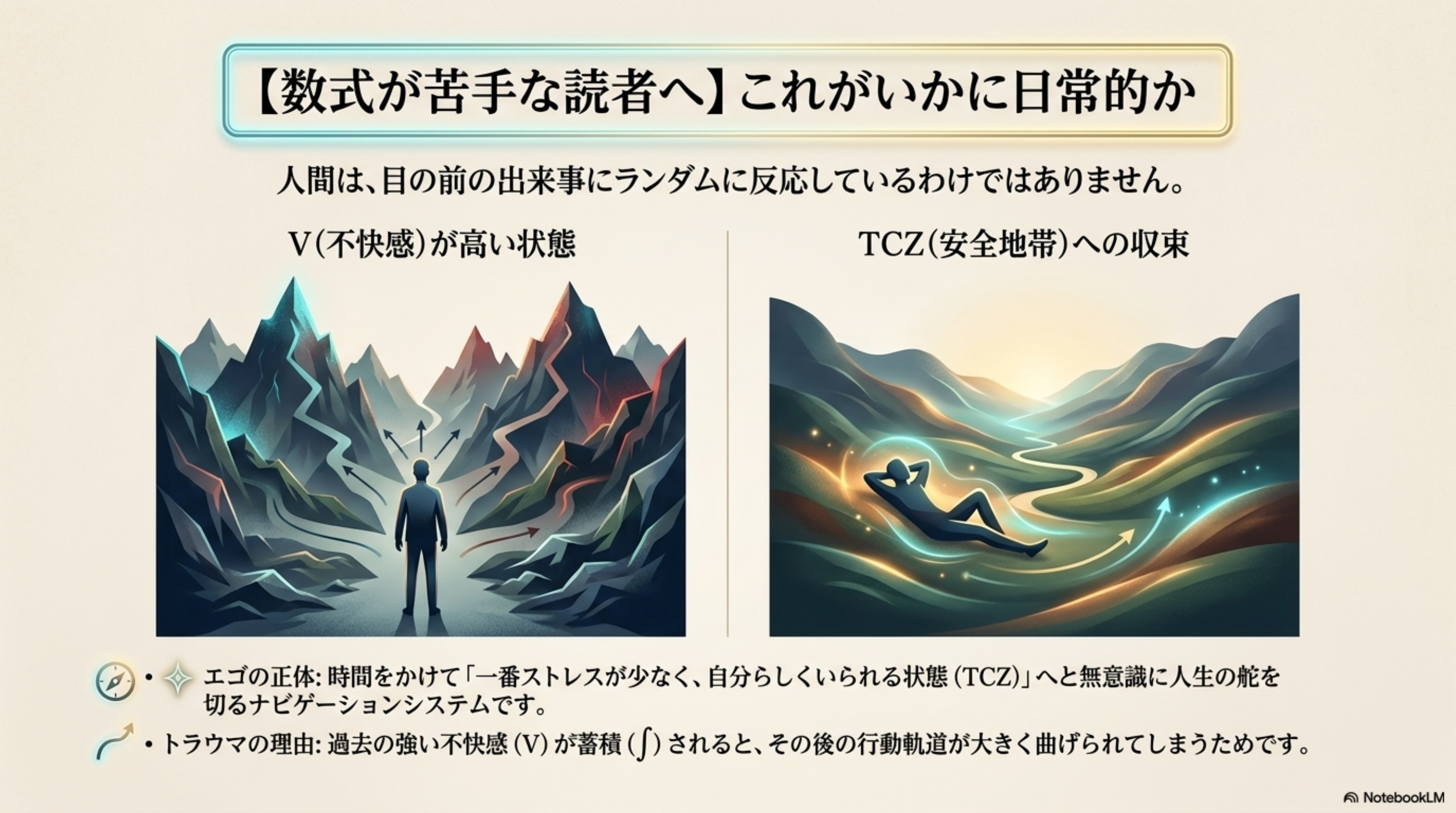
W(可能世界)= 起こりうる状況の集合。V(x,t)= 心の不快感メーター。TCZ = 完全に安定し、行き詰まることのない領域。心の「安全地帯」。
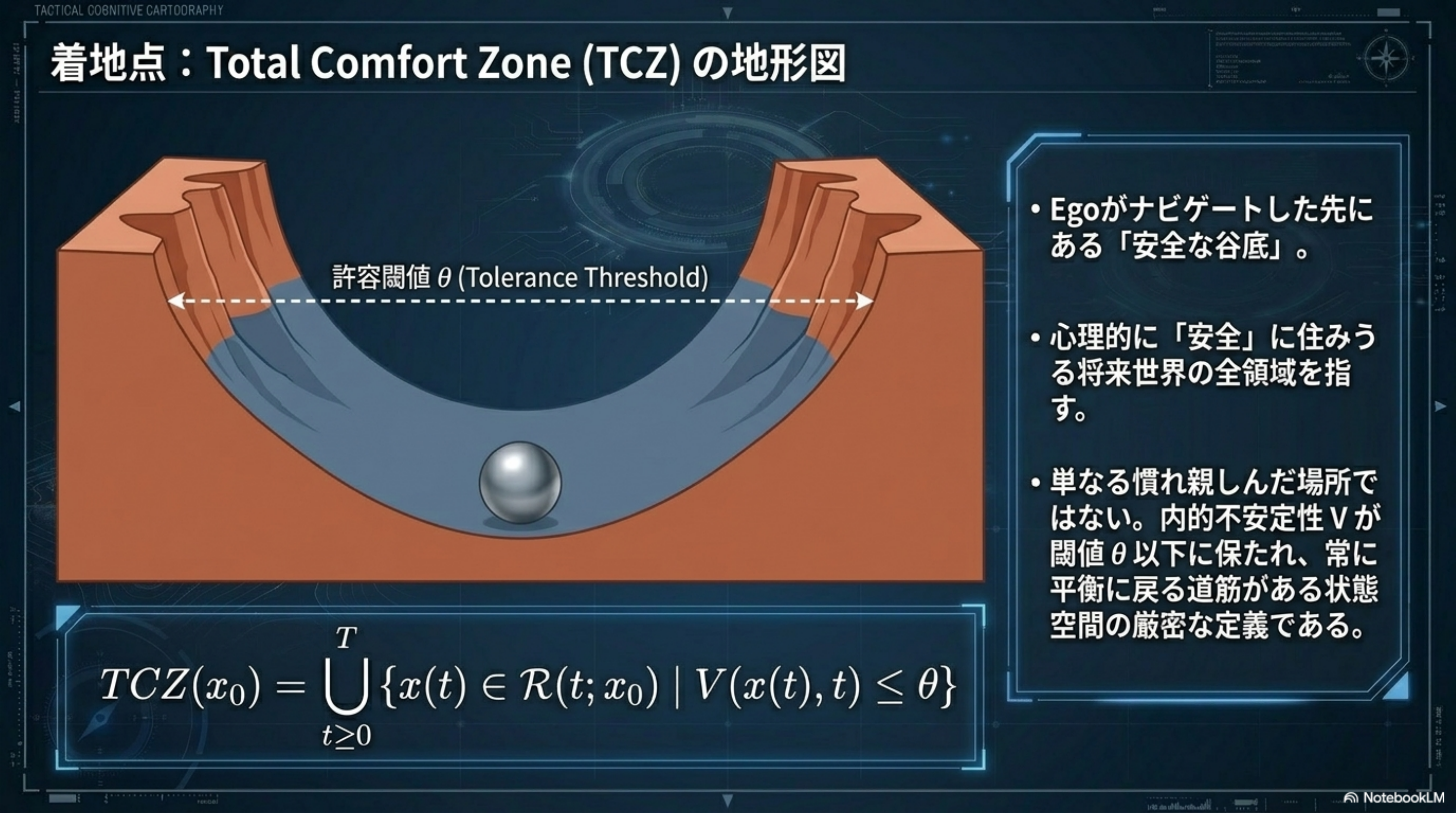
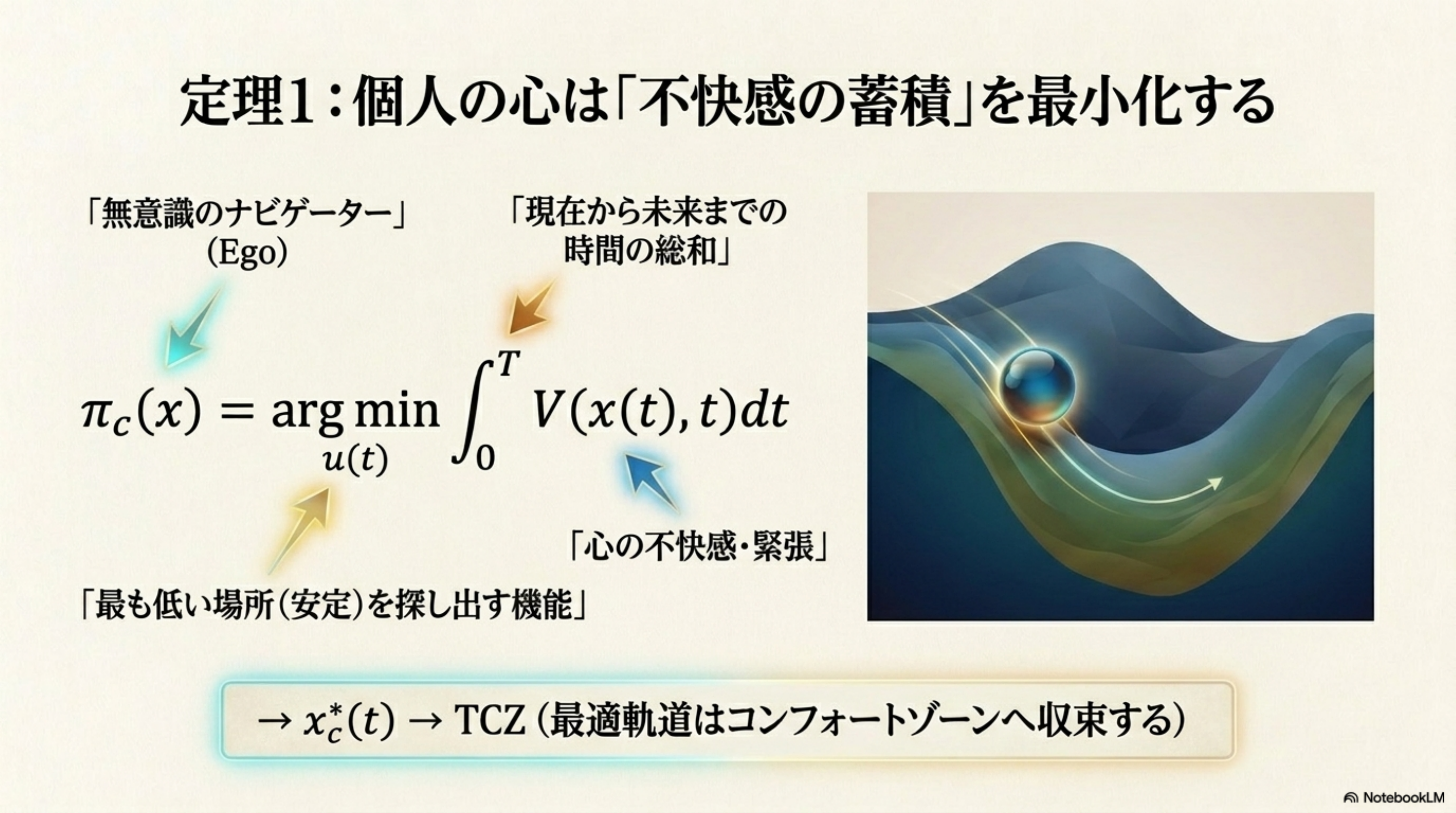
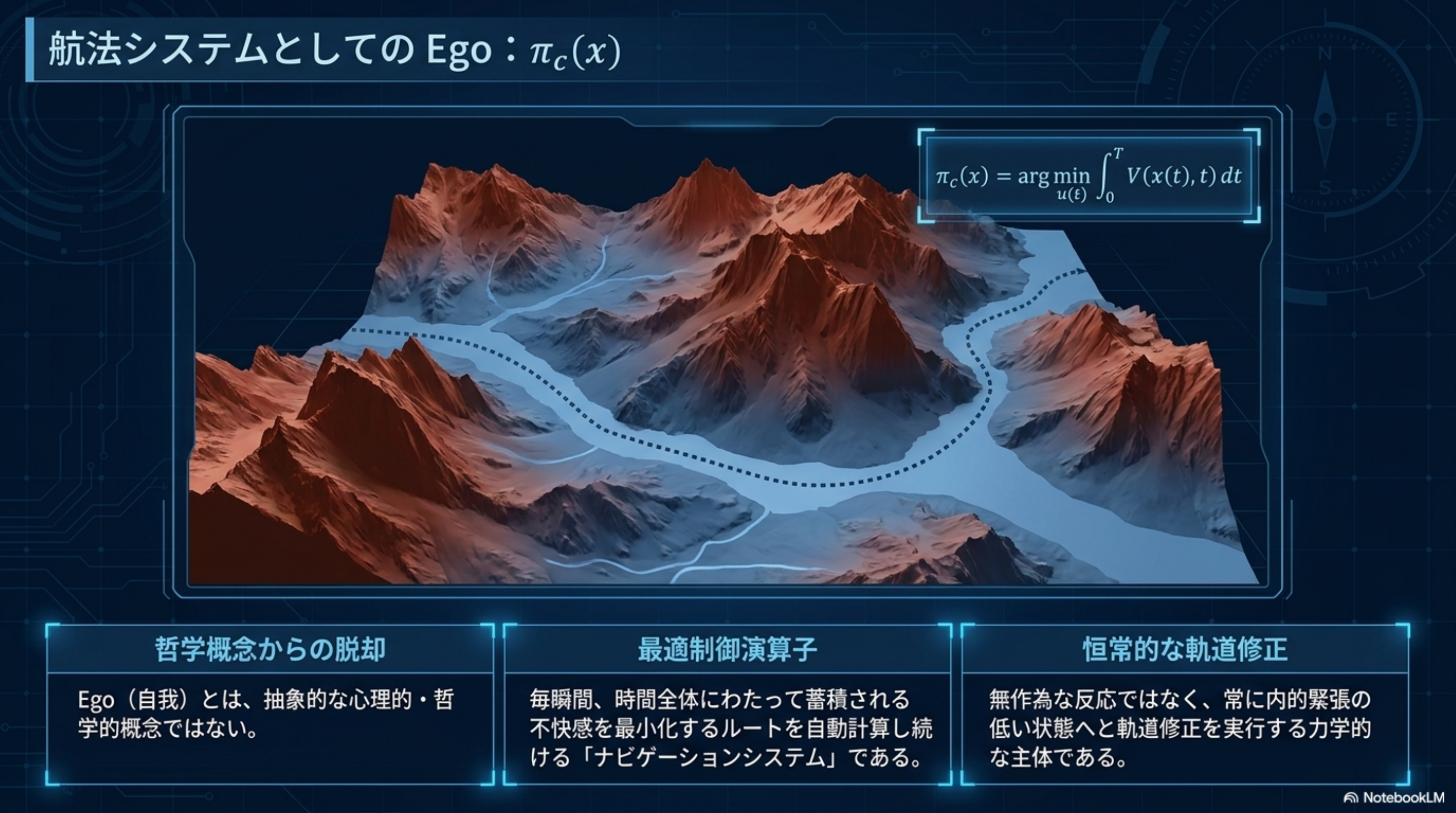
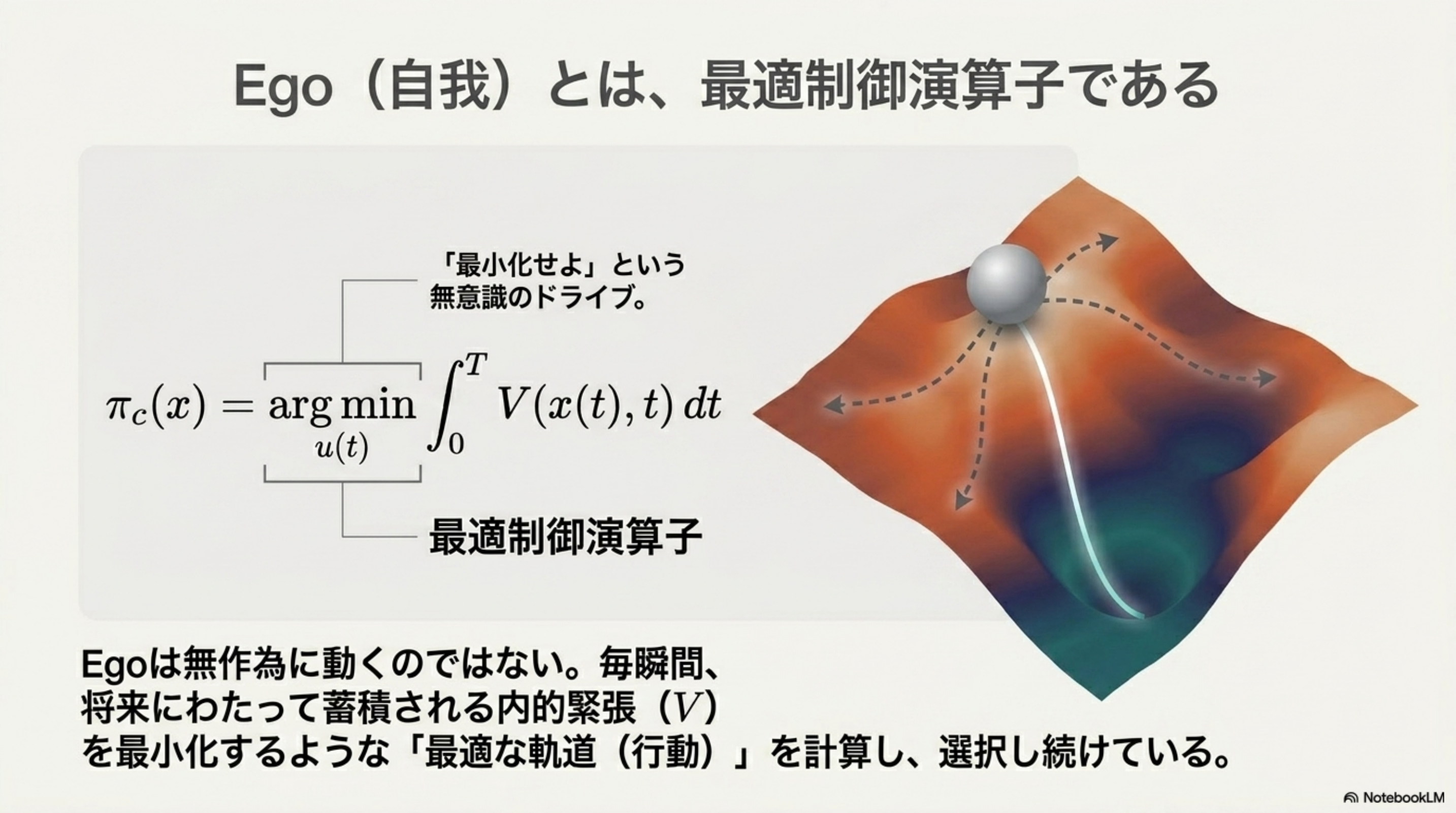
Ego(自我)は哲学概念ではない。毎瞬間、時間全体にわたって蓄積される不快感を最小化するルートを自動計算し続ける「ナビゲーションシステム」である。Φ = V0 を B.1 補題に代入することで、TCZ への収束が数学的に保証される。
= Ego が「累積する不快度の総量」を最小化する選択を、毎瞬間 自動で行う
状態 x における Ego の 最適選択ルール。意識ではなく無意識の最適化器が出力する。
数ある選択肢 u(t) の中から 右辺の積分を最小にする u を選ぶ操作。「最も楽な道」の選択。
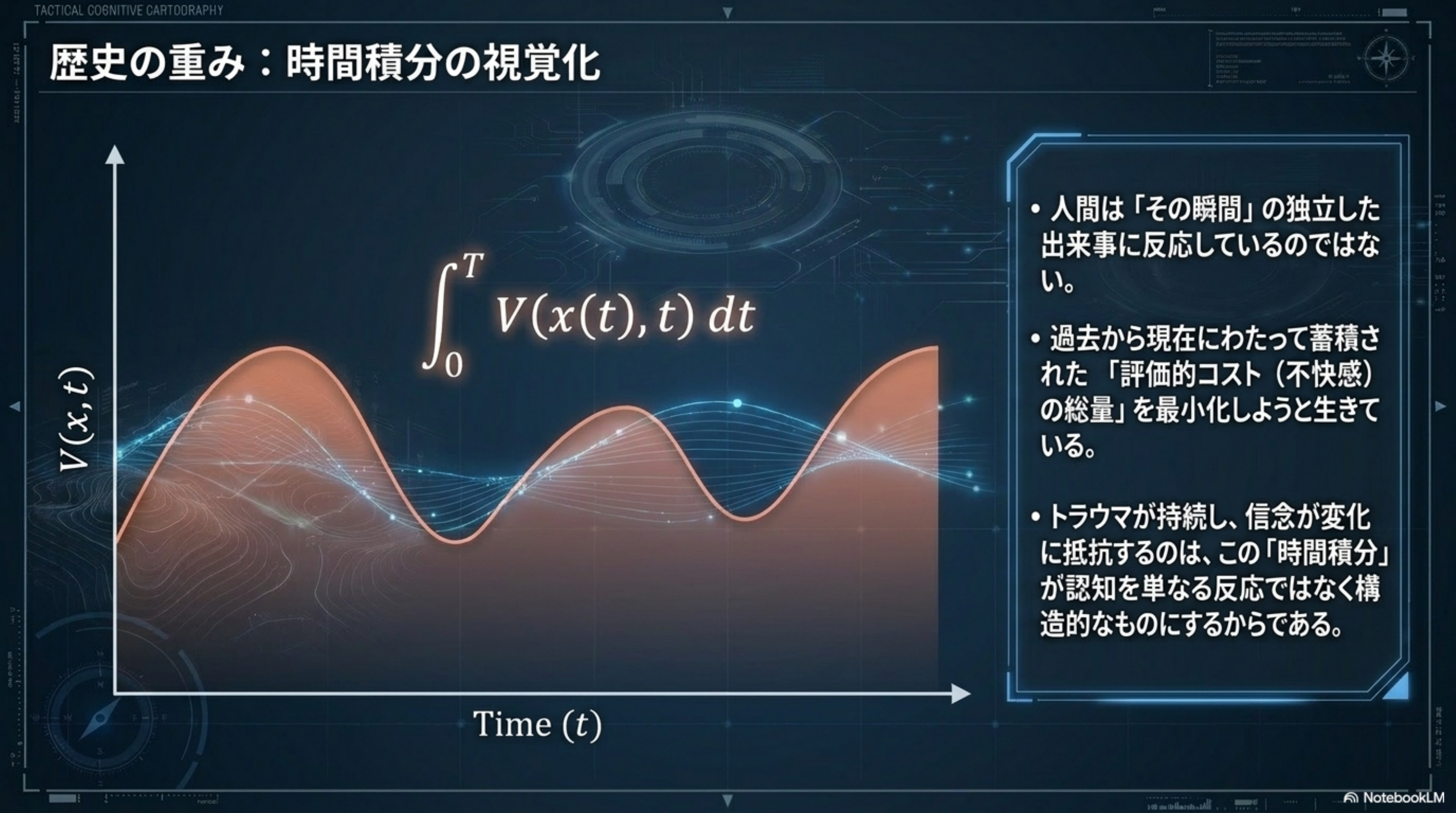
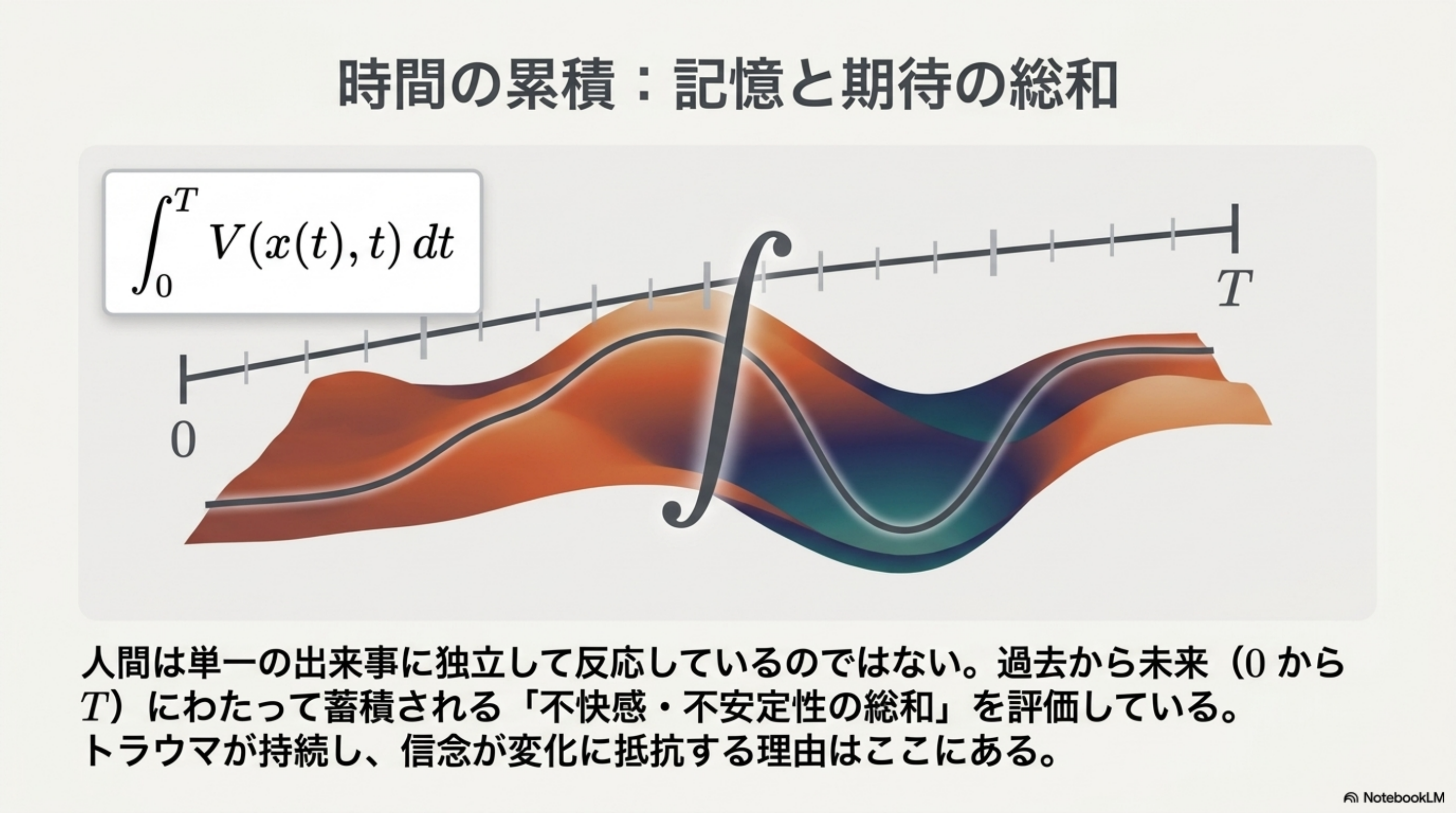
時間 0 から T までの累積。瞬間の不快ではなく、時間全体の総量を見る。これが「短期的快楽の罠」を回避する数学的構造。
時刻 t における状態 x の 客観的不快度。マスターキー(章 04)で見た V(x,t) と同じ評価関数。
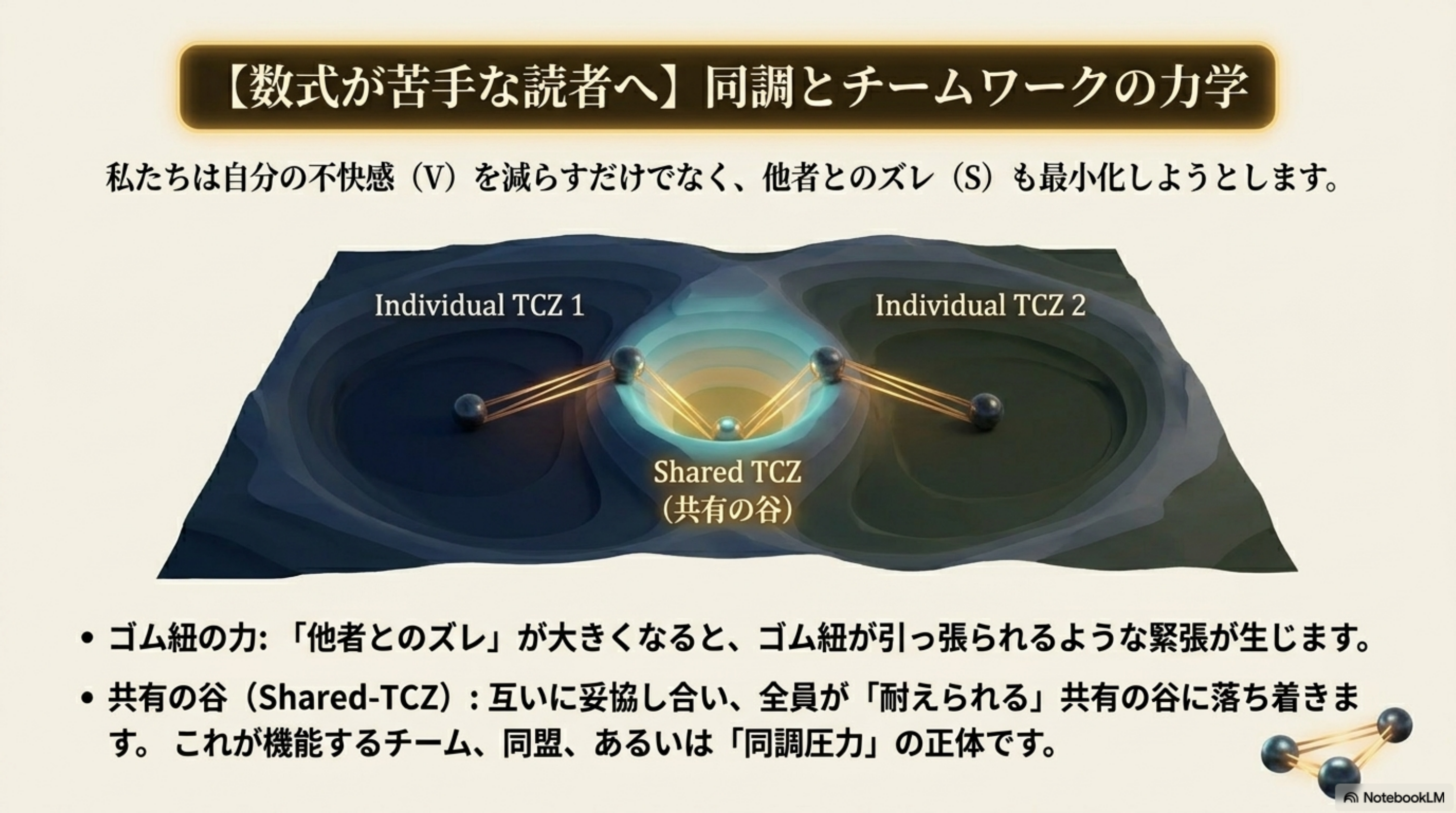
人間は一人では生きていない。私たちは自分の不快感(V)を減らすだけでなく、他者とのズレ(S)も最小化しようとする。これが機能するチーム、同盟、あるいは「同調圧力」の正体。
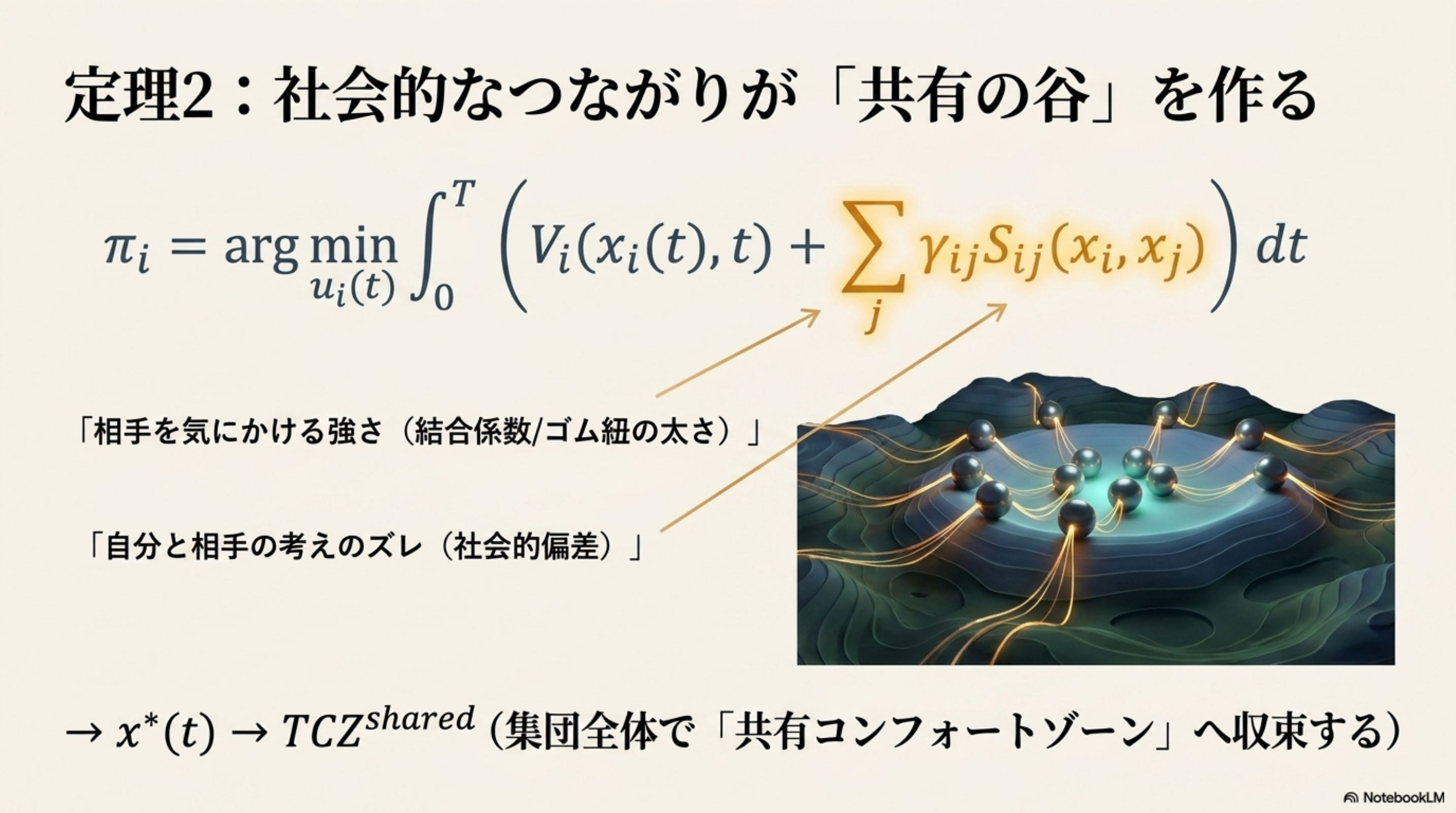
= 自分の不快(Vi)に加えて、他者とのズレ(γij Sij)も最小化する
主体 i の 最適選択ルール。N 人いれば π1, π2, ..., πN が同時に走る。
主体 i 自身の個人的な不快度。定理 1 と同じ V0 を i 視点で書いただけ。
主体 i と j の 結合の強さ。γ が大きい = 強く結ばれている(家族・チーム)、小さい = 結合弱(他人)。
主体 i と j の 状態のズレ(不整合度)。γ・S が両方大きいと「他者と違うこと自体が痛い」。これが同調圧力の数学的正体。

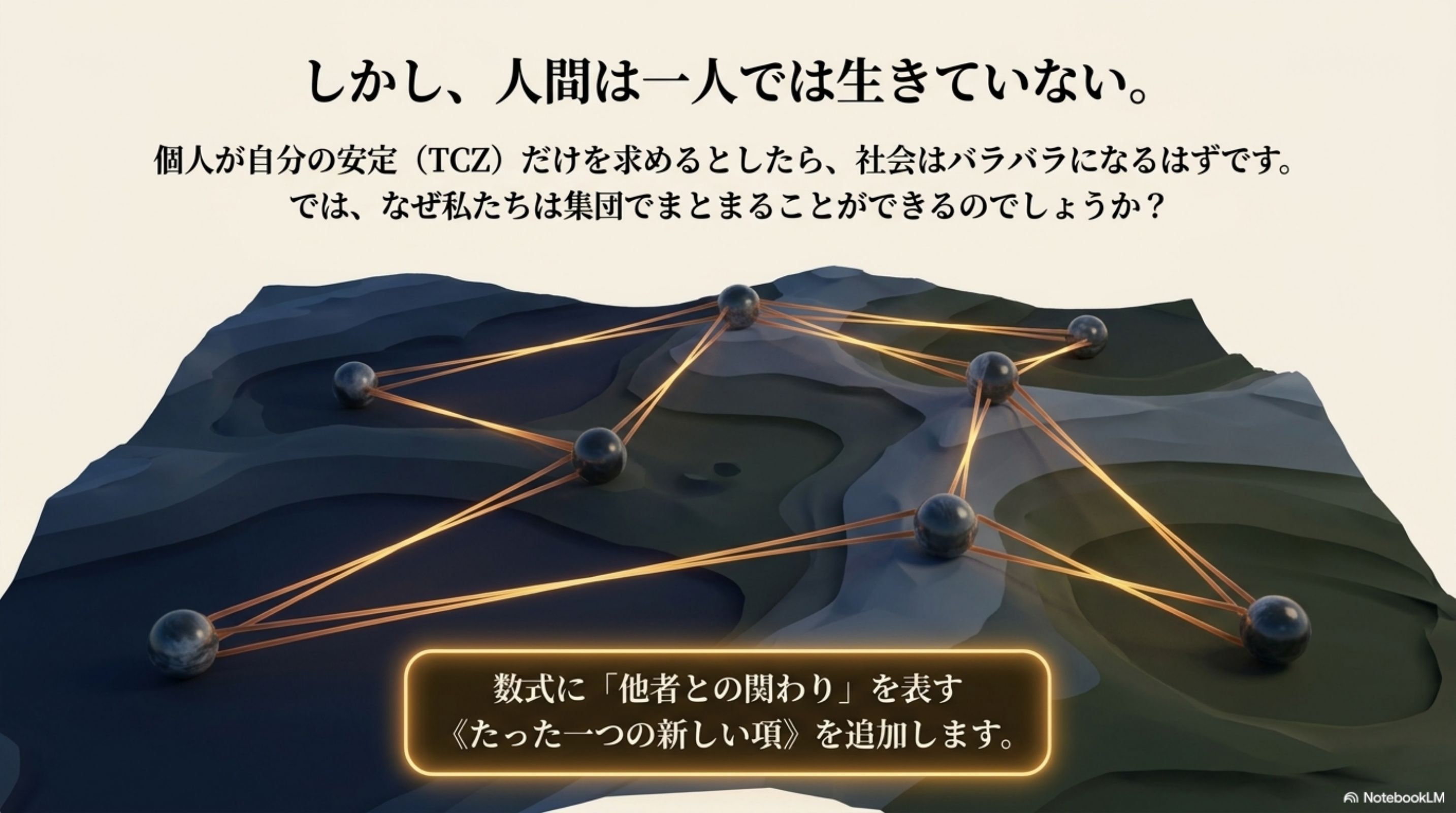
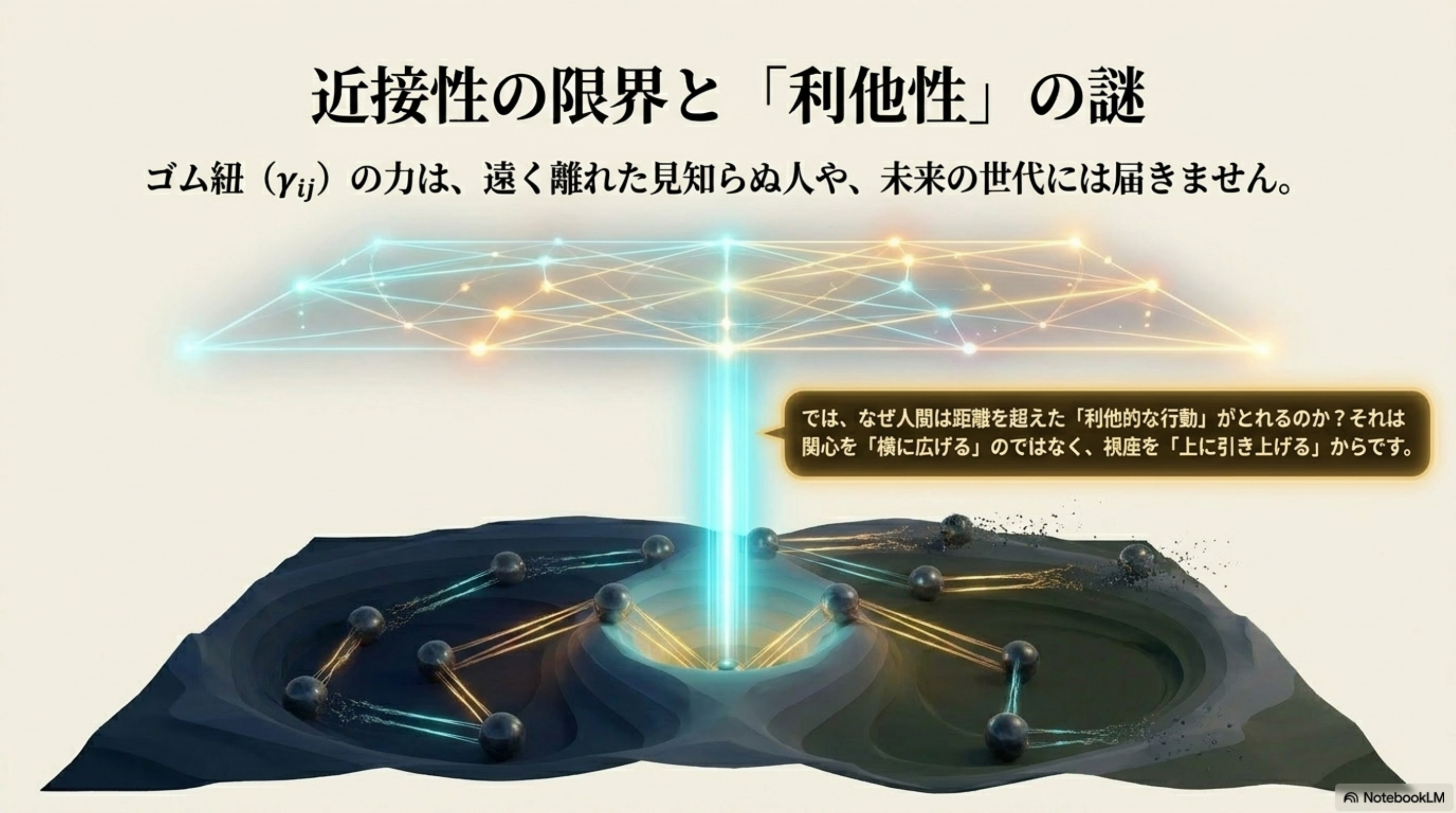
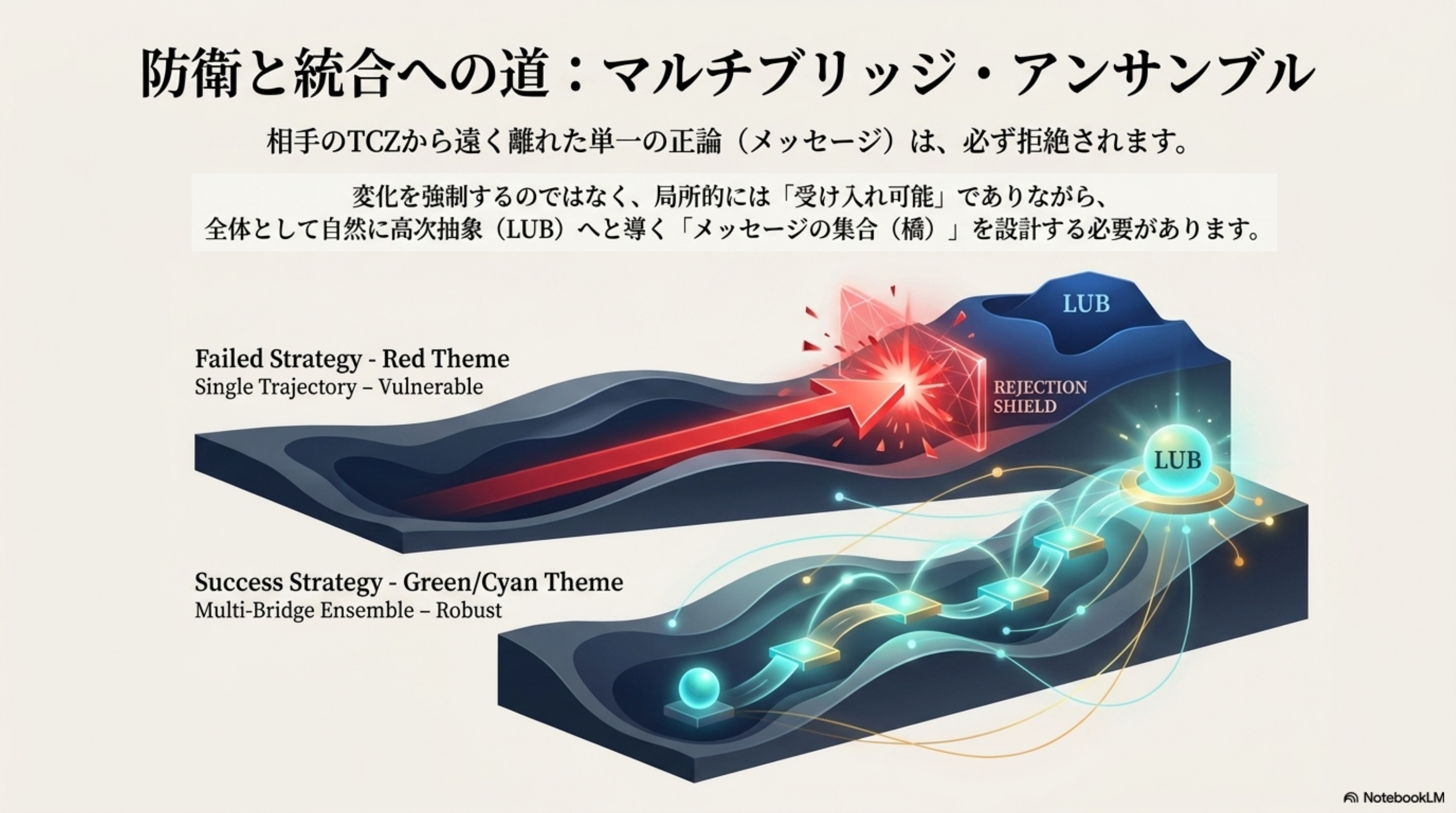
ゴム紐(γij)の力は、遠く離れた見知らぬ人や未来の世代には届かない。なぜ人間は距離を超えた利他的行動がとれるのか?それは関心を「横に広げる」のではなく、根座を「上に引き上げる」から。
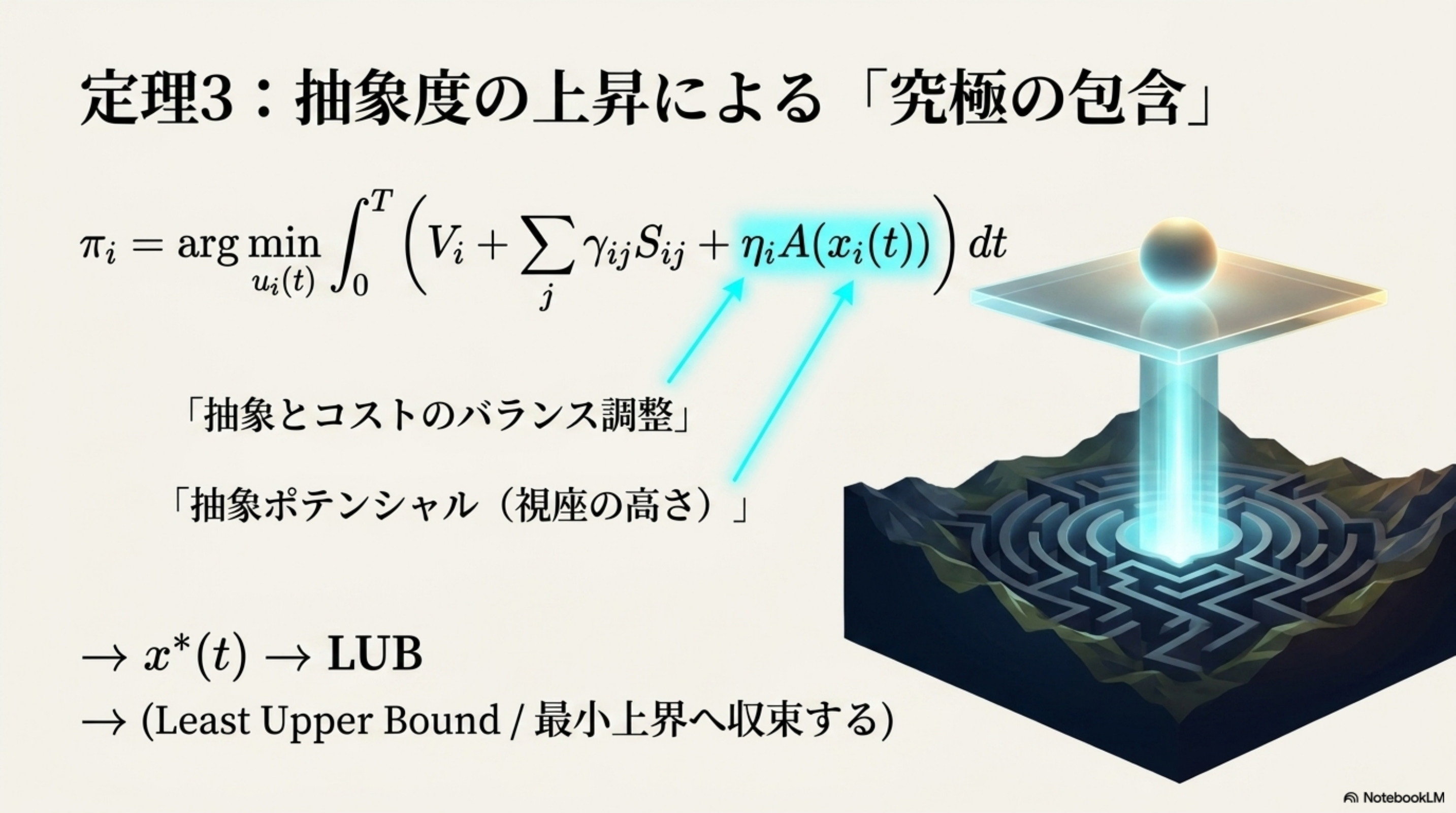
= 定理 2 の最適化問題に「高次目的(LUB)からの距離」を最小化する第 3 の項を追加
主体 i の 最適選択ルール。定理 2 と同じ形だが、追加項 ηi A(xi) で 視座が縦に上がる。
定理 2 の遺産。自分の不快 + 他者とのズレ。これだけでは 「内輪の谷」 に閉じ、外集団は包摂できない。
主体 i にとって、その 高次目的(志/ミッション) がどれだけ重いか。抽象度ポテンシャルの効き目係数。
LUB(共有された志)からの距離。i が今どれだけ離れているか。これが下がる = 包摂が成立。

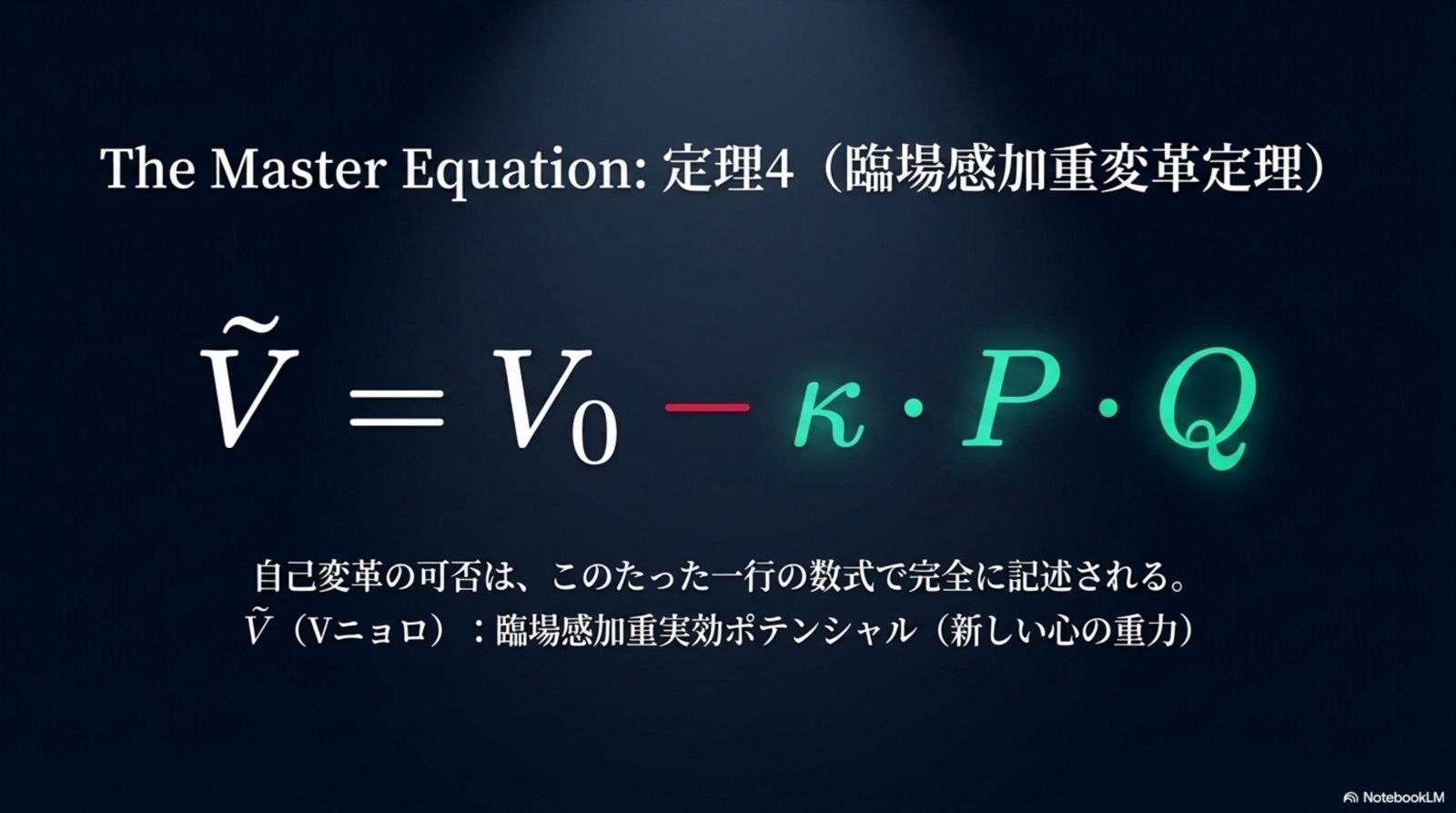
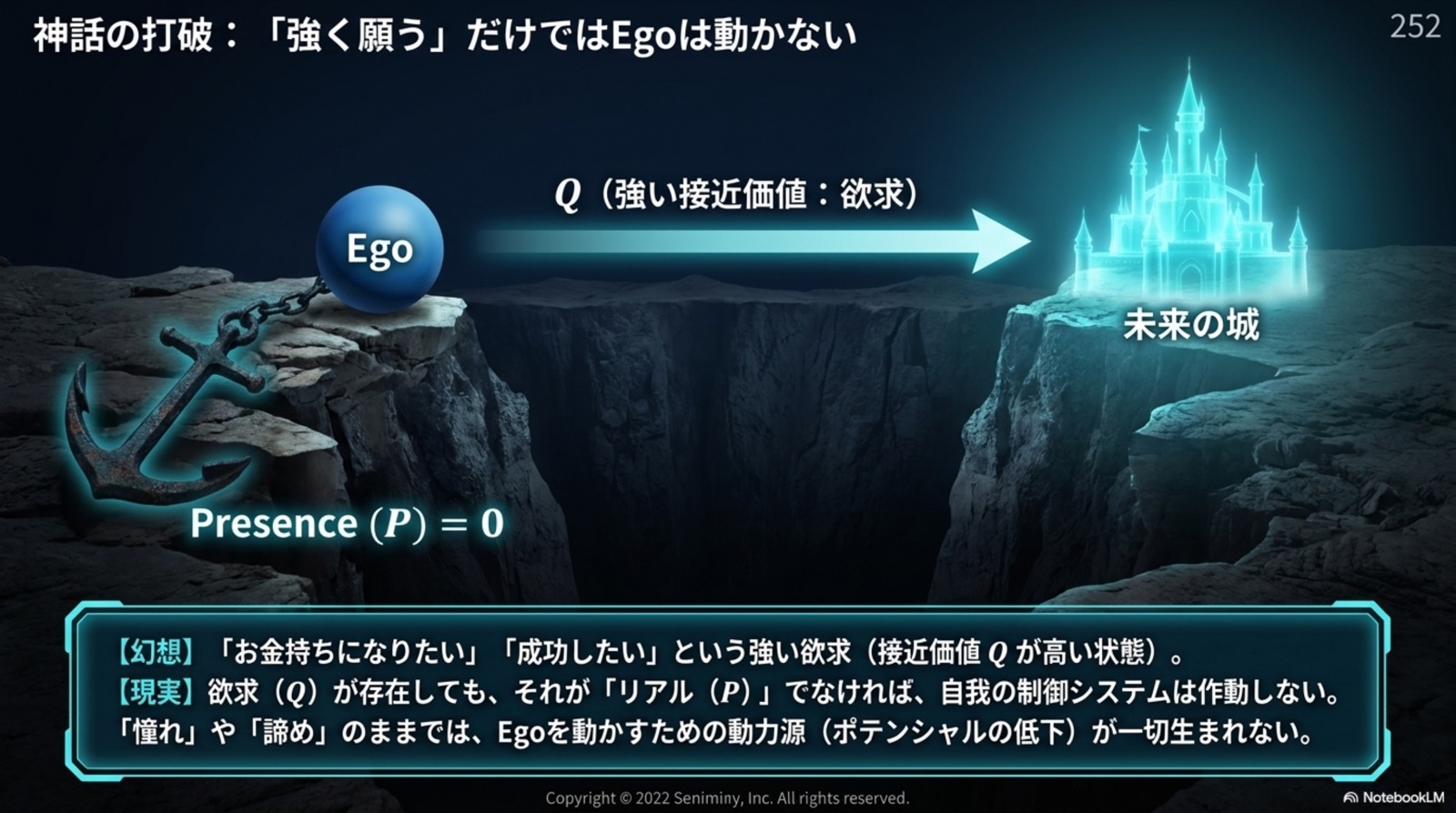
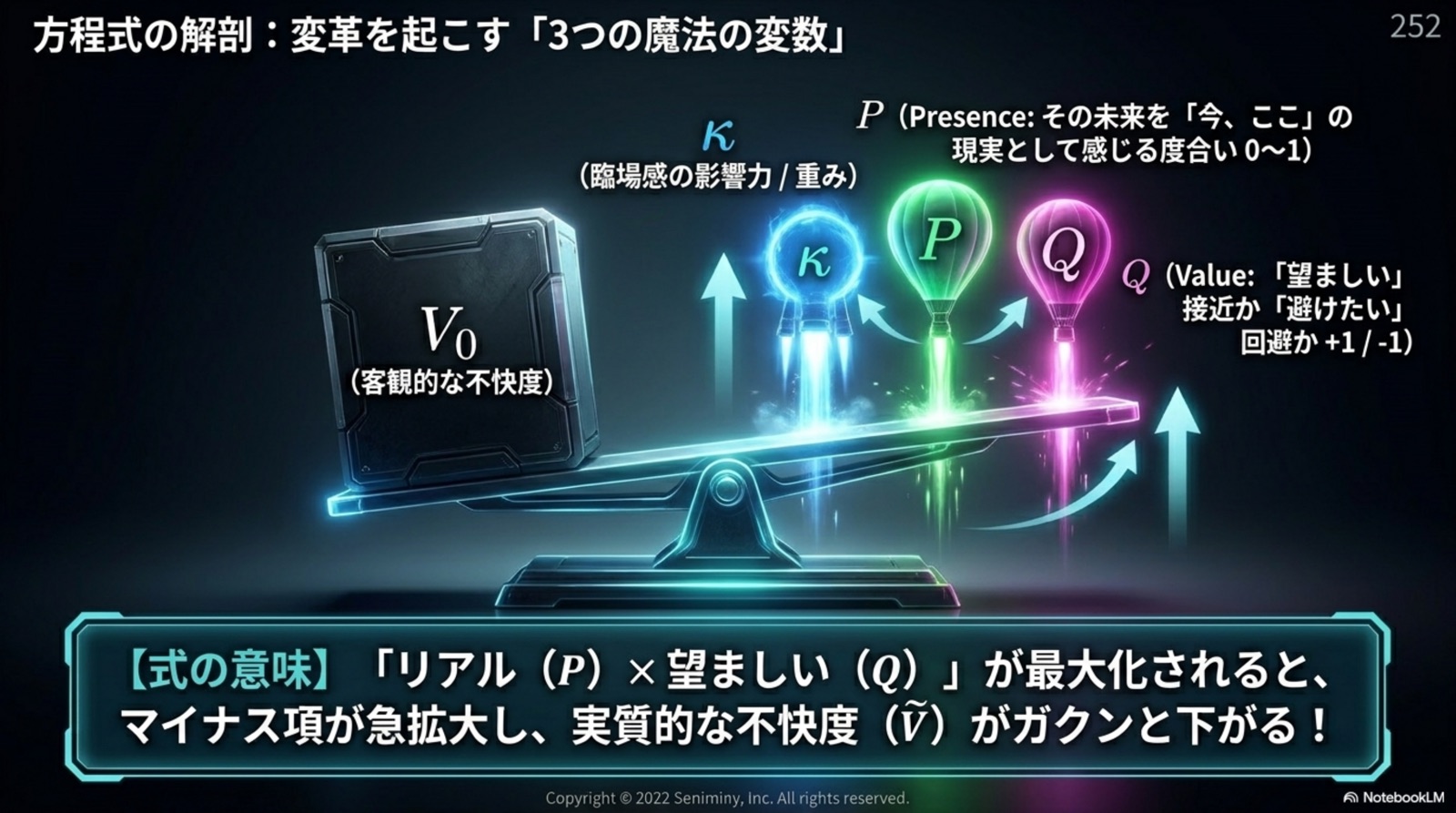
本論文の心臓部。「人は不快を避けるだけでなく、リアルに感じる安定世界へ向かう」。客観的な不快(V₀)を「臨場感(P)× 望ましさ(Q)」が割引く。これが TCE 体系の中核命題。





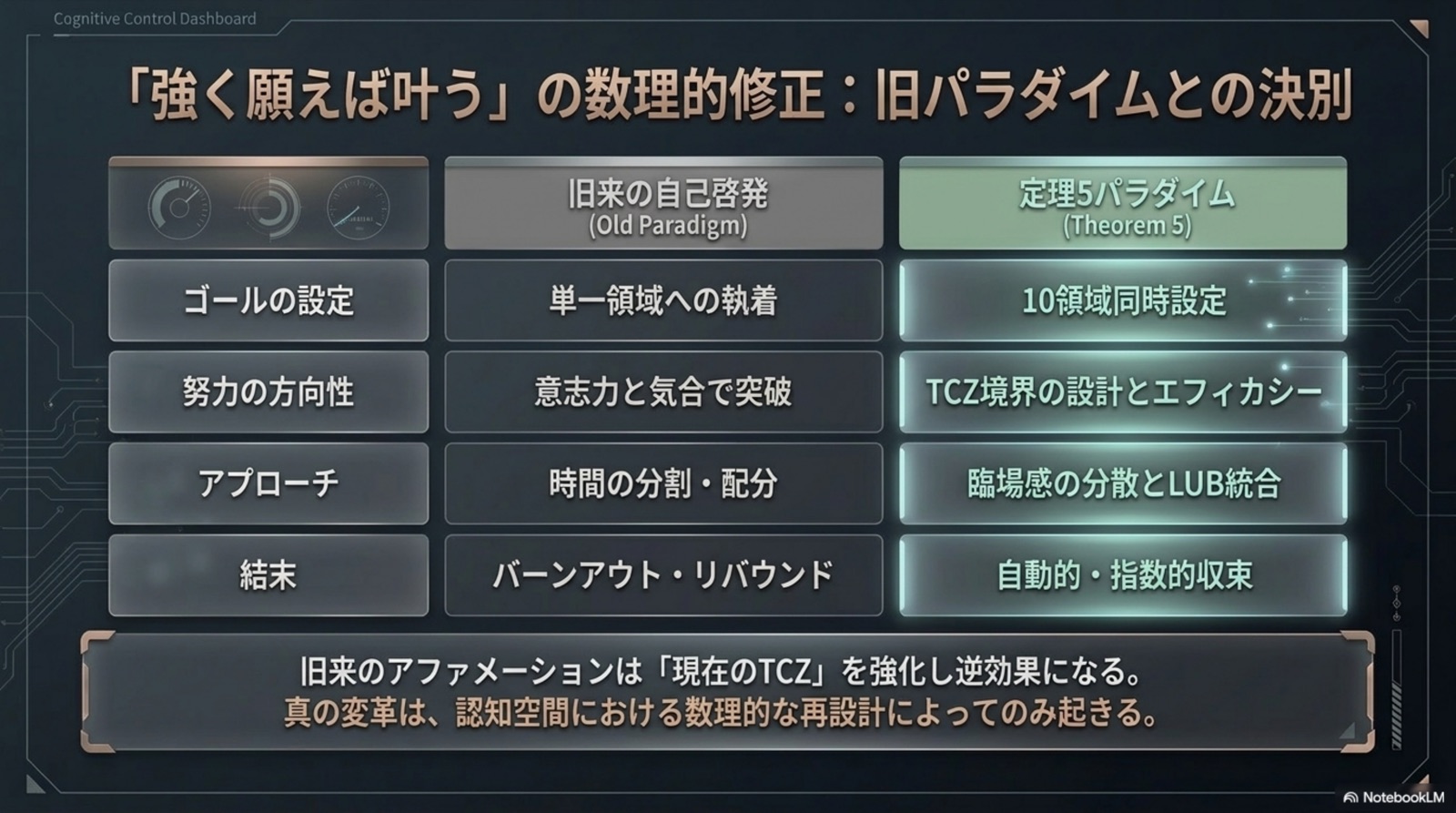
本章で扱うのは TCE 体系の 心臓部 ── 中心式 Ṽ = V₀ − κPQ。これまでの自己啓発が「気合と根性」「強く願えば叶う」という精神論に頼ってきたのに対し、Tomabechi 理論は人間の意思決定を 制御工学の最適化問題 として記述する。
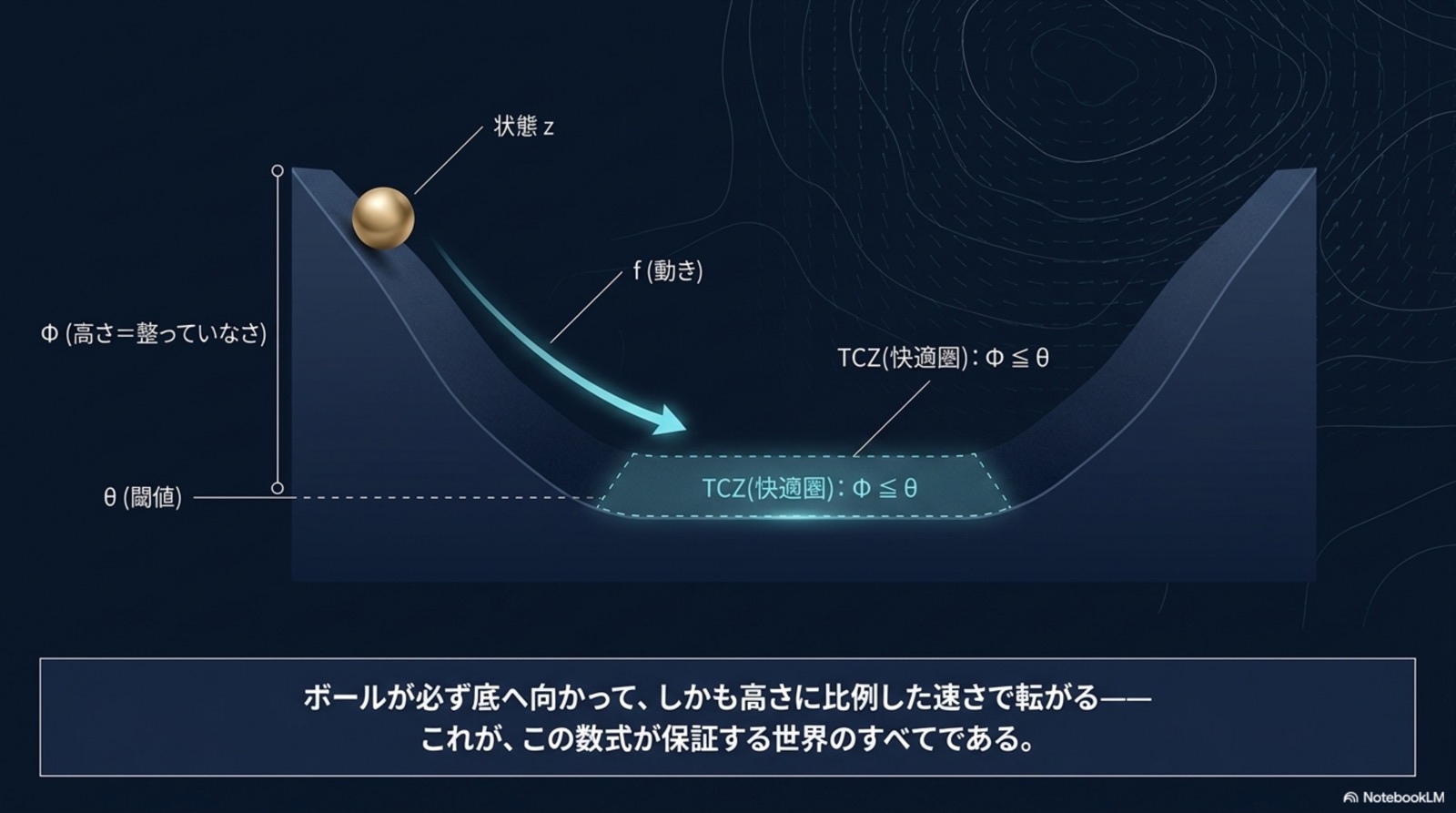
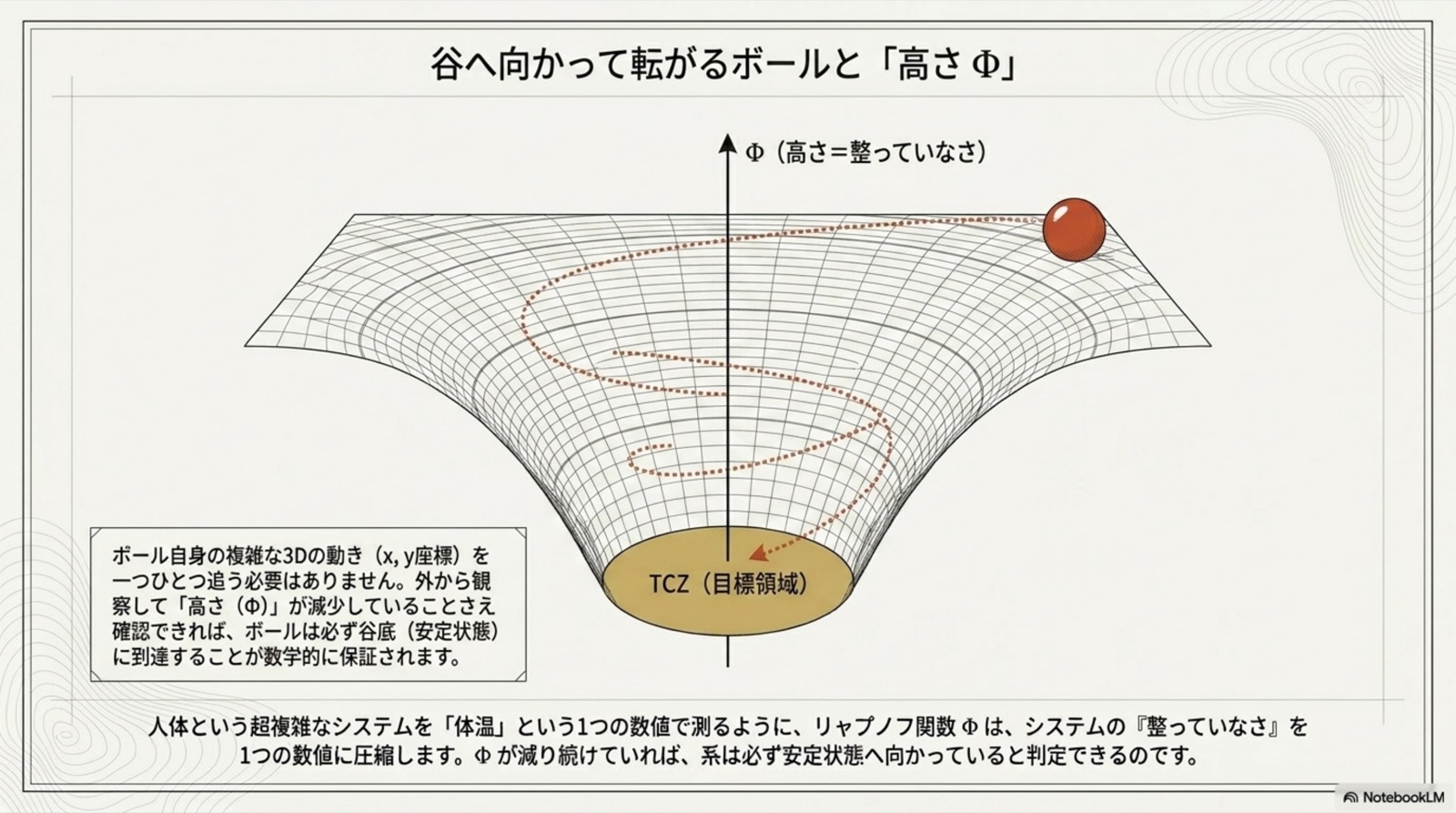
ボールが谷へ自然に転がるように、心は 主観的不快 Ṽ を最小化する方向 へ自動で動く。介入とは 意志の量を増やすこと ではなく、谷の地形そのものを設計すること ── これが本章の出発点である。
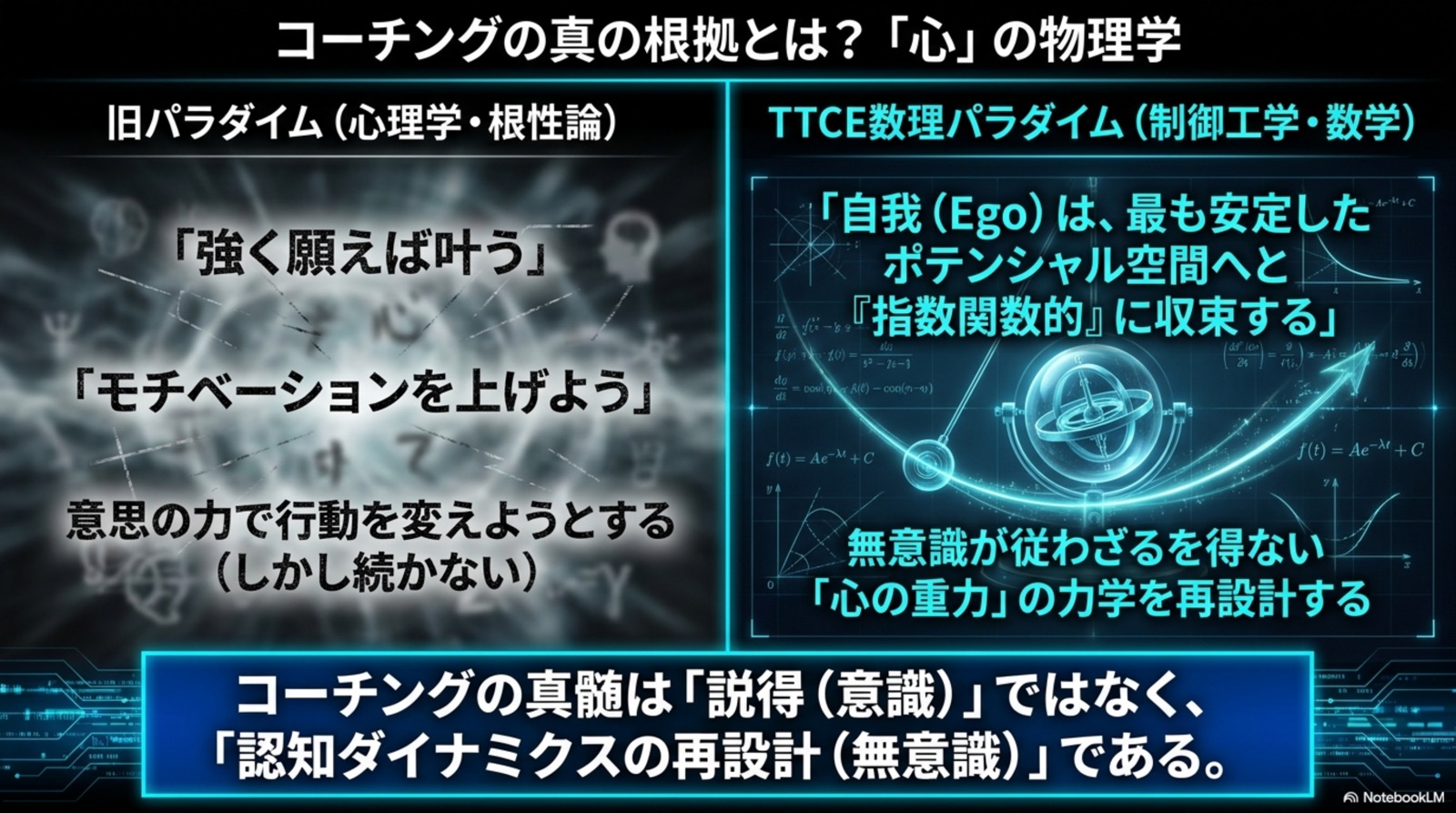
つまり、コーチングや変革は 「気合で動かす」 仕事ではない。それは 式が下がる構造を作る 仕事である。地形が掘り下がれば、ボール(Ego)は重力に引かれて自然に転がる。
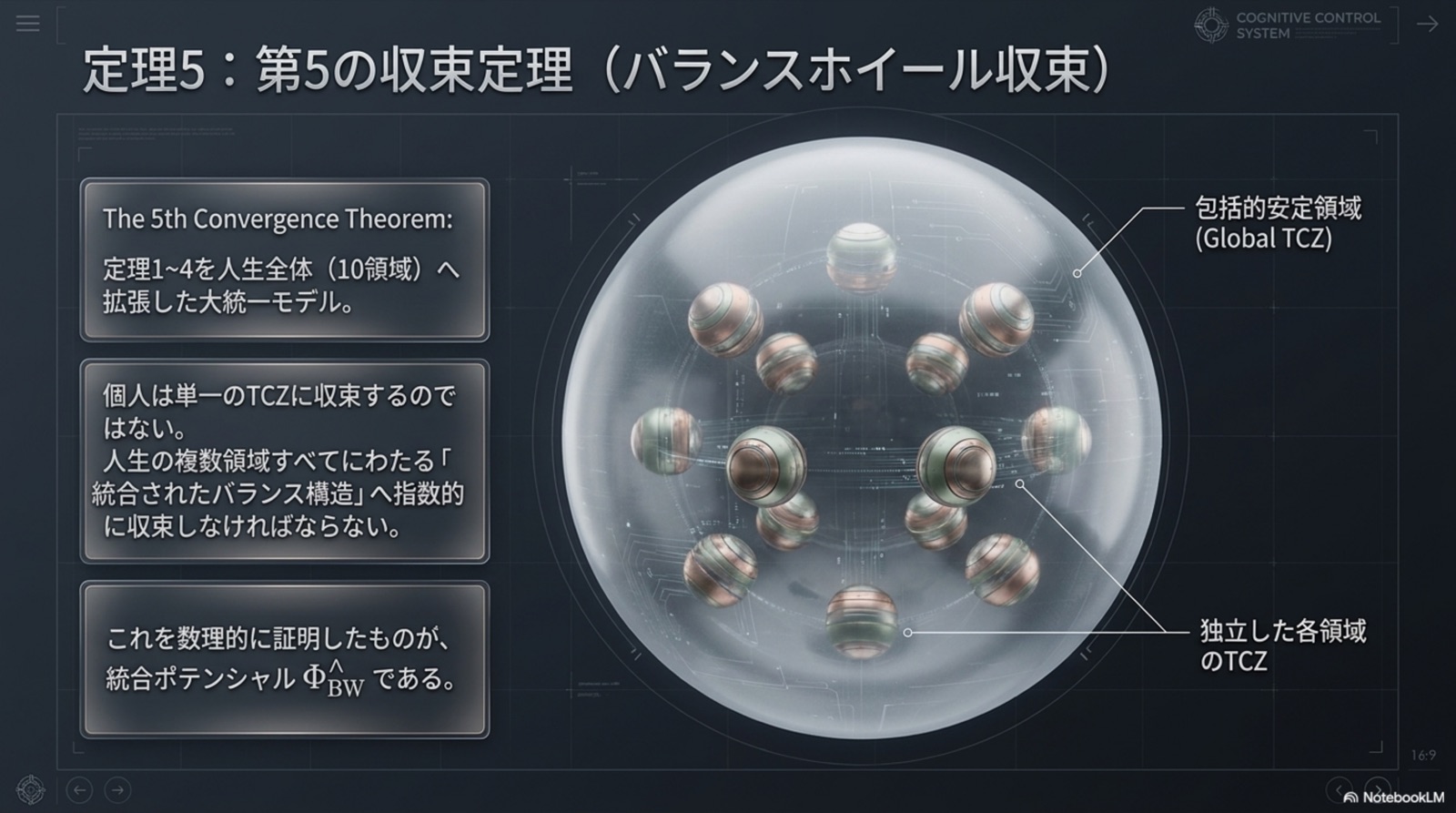
人生は単一ゴールでは安定しない。10 領域(職業 / 家族 / 生涯学習 / 趣味 / 社会貢献 / ファイナンス / 健康 / 抽象度 / リーダーシップ / エソテリシティ)に分散したゴール構造が、偏り(Imb)・矛盾(Frag)・高次自己像との不整合(A_BW)を含む統合ポテンシャルとして集約される。




中心式 Ṽ = V₀ − κPQ は強力だが、単一ゴールに焦点を絞ると致命的な脆弱性を生む。仕事だけ・家族だけ・健康だけを最大化する人生は、1 領域が崩れた瞬間に全体が崩壊する。「キャリアの圧倒的成功」と「家族との時間」は無意識下で衝突し、Ego はシステムを停止させる。
本章の課題は ── 個人の TCZ を、人生 10 領域すべてに拡張 すること。第 5 の収束定理は、定理 1〜4 の力を 人生という複雑系全体 へと一般化する大統一モデルである。
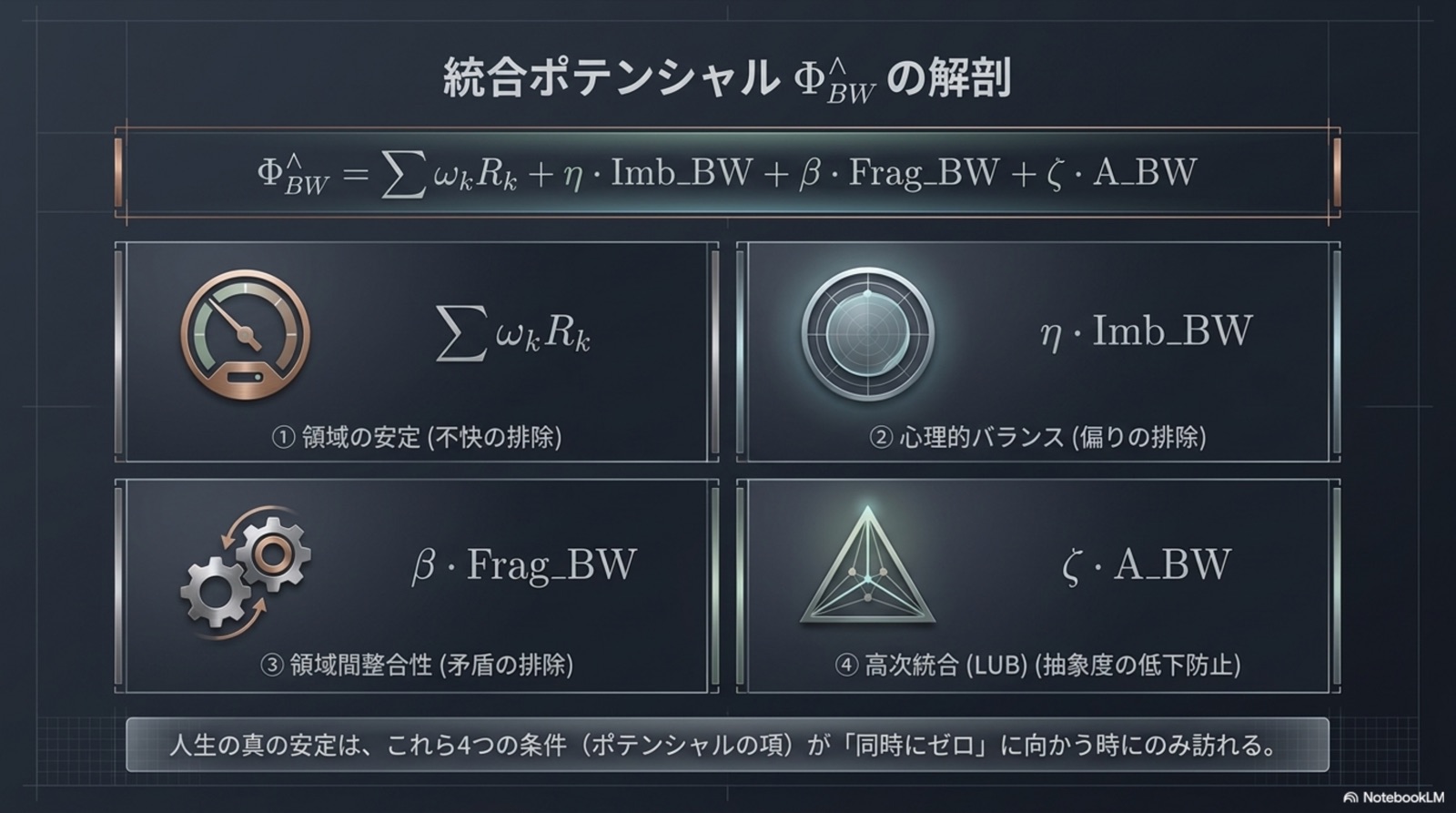
4 条件が同時にゼロへ向かうとき、Ego は 引力盆地 に落ちるボールのように、自動で安定領域へ転がり込む。これが大統一理論が示す「人生の真理」である。
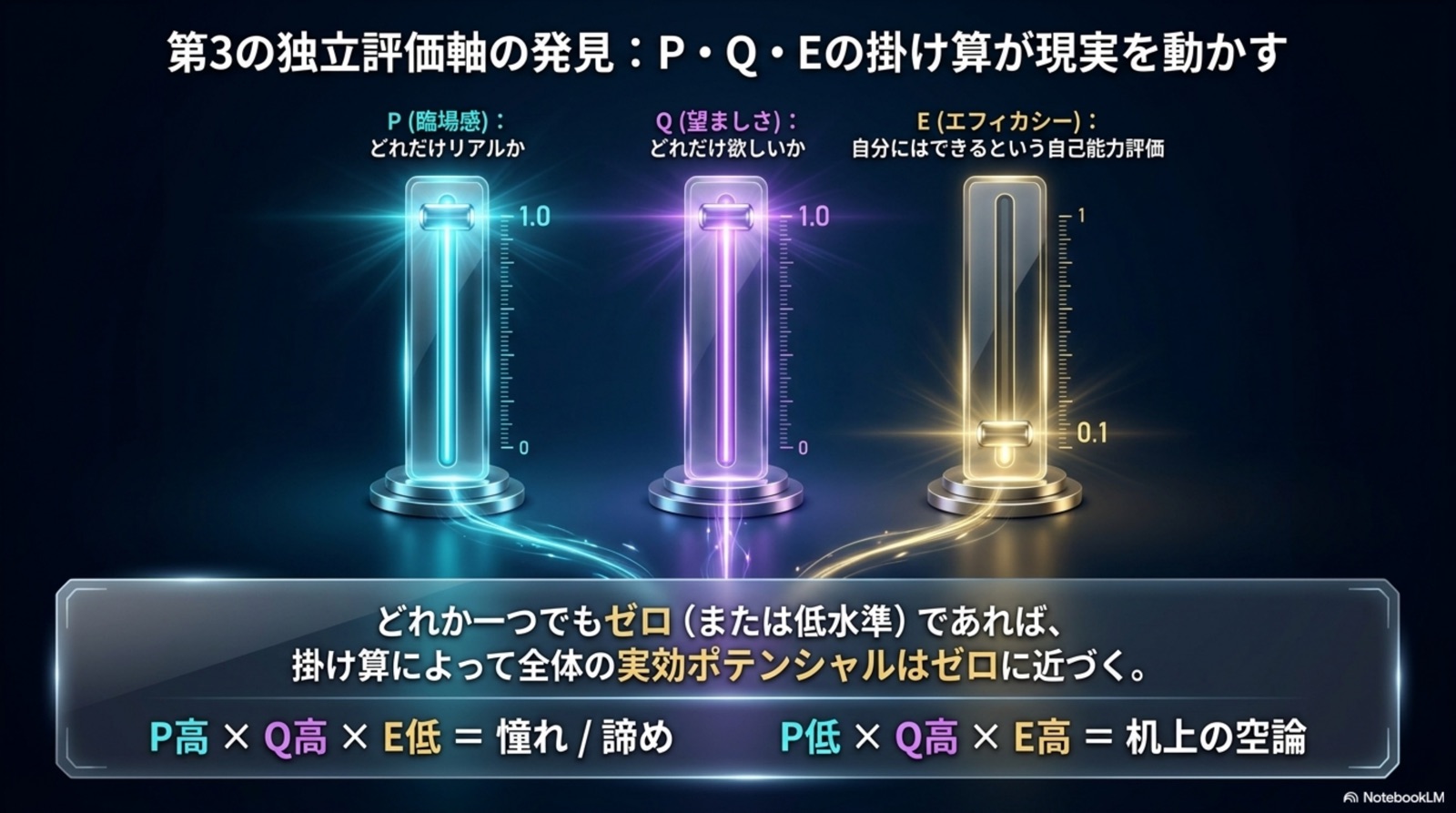
中心式 Ṽ に「自分にできる感」E(エフィカシー)を加えた最終形。Q を正負分解(Q_+ / Q_−)し、接近項にのみ E を乗じるのが構造的中核。これにより「コーチが介入できる唯一の軸 = E」が浮かび上がる。これが T 理論的コーチングの数理的中核。


定理 4 の中心式 Ṽ = V₀ − κPQ には、まだ 第 3 の独立評価軸 が隠れていた ── それが E(エフィカシー / 自分にできるという確信)。これを加えることで、コーチングは初めて 数学的に定義可能 になる。
重要なのは E が乗る場所。Q を 接近(Q+)と回避(Q−)に分解したとき、E は 接近項にだけ 乗る。「嫌だから逃げる」(回避)は能力評価なしに発火するが、「望ましい未来へ向かう」(接近)は 「自分はそこに行ける」感が必須。だからこそ E が ── コーチが介入できる唯一の軸となる。
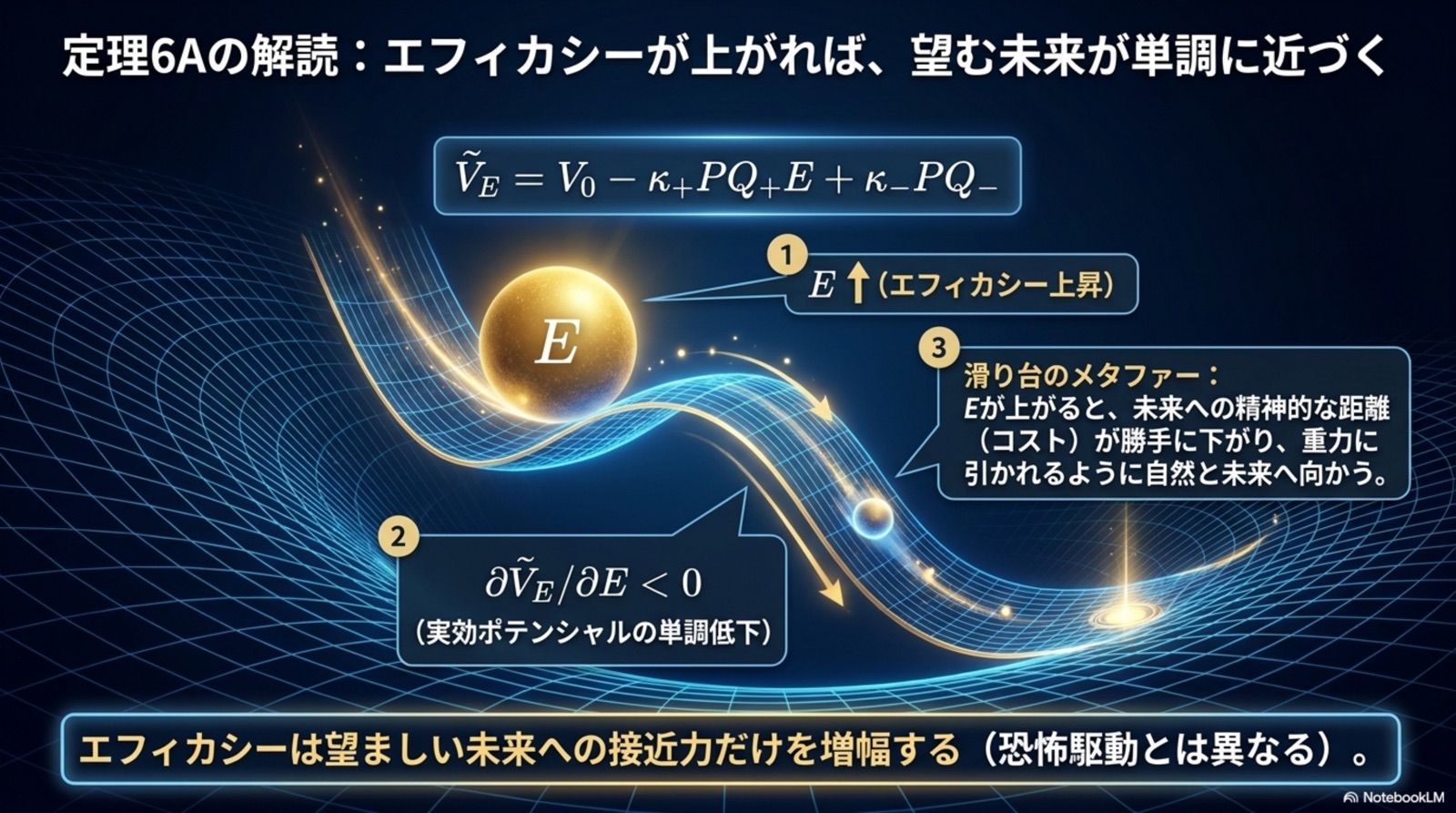
滑り台が傾く ── これがコーチングの実体である。コーチングとは「気合で動かす」ことではなく、ゴール g を達成可能領域 TCZP,E の内側へ引き入れる 作業 ── と数学的に定義される。

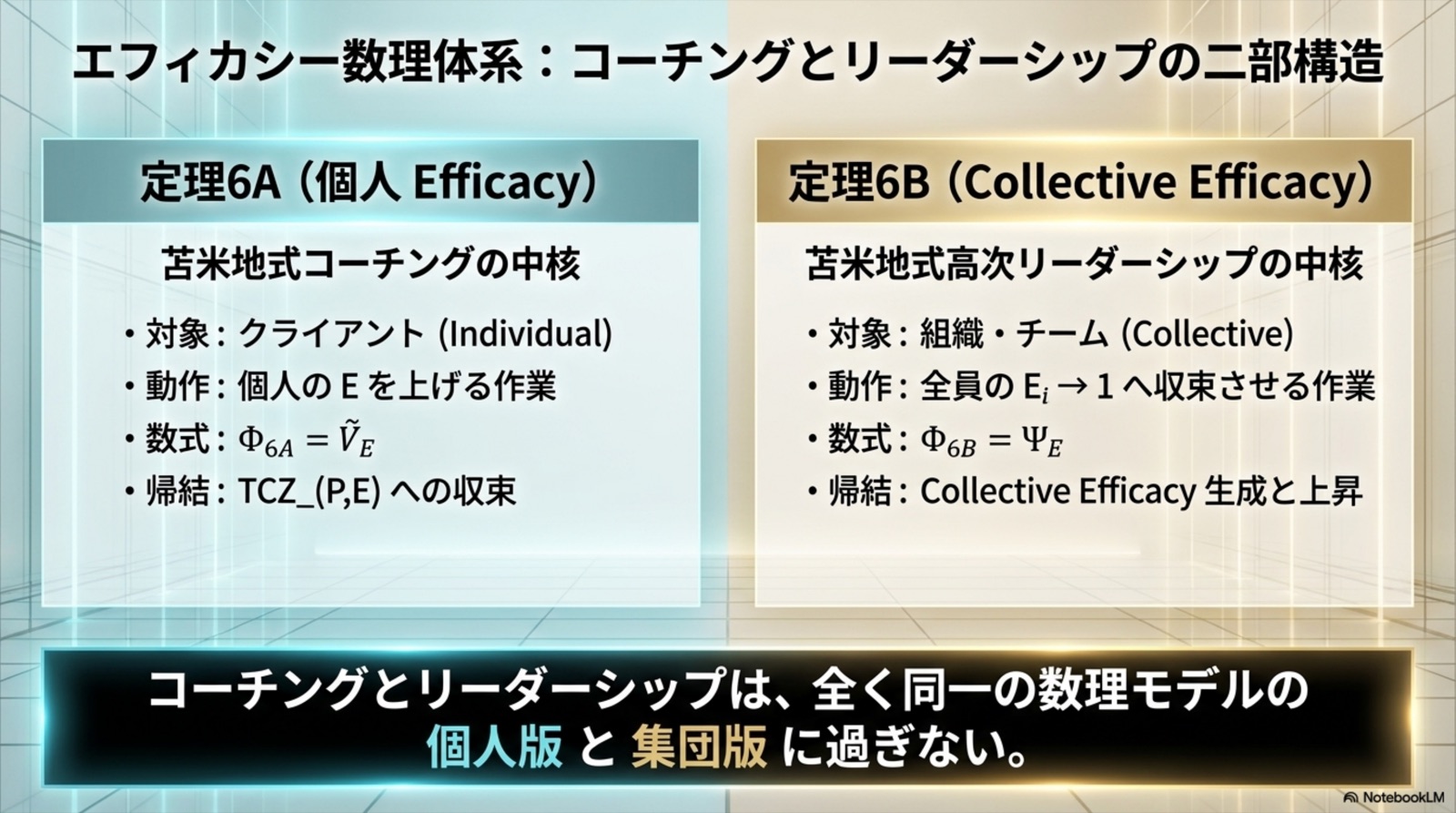
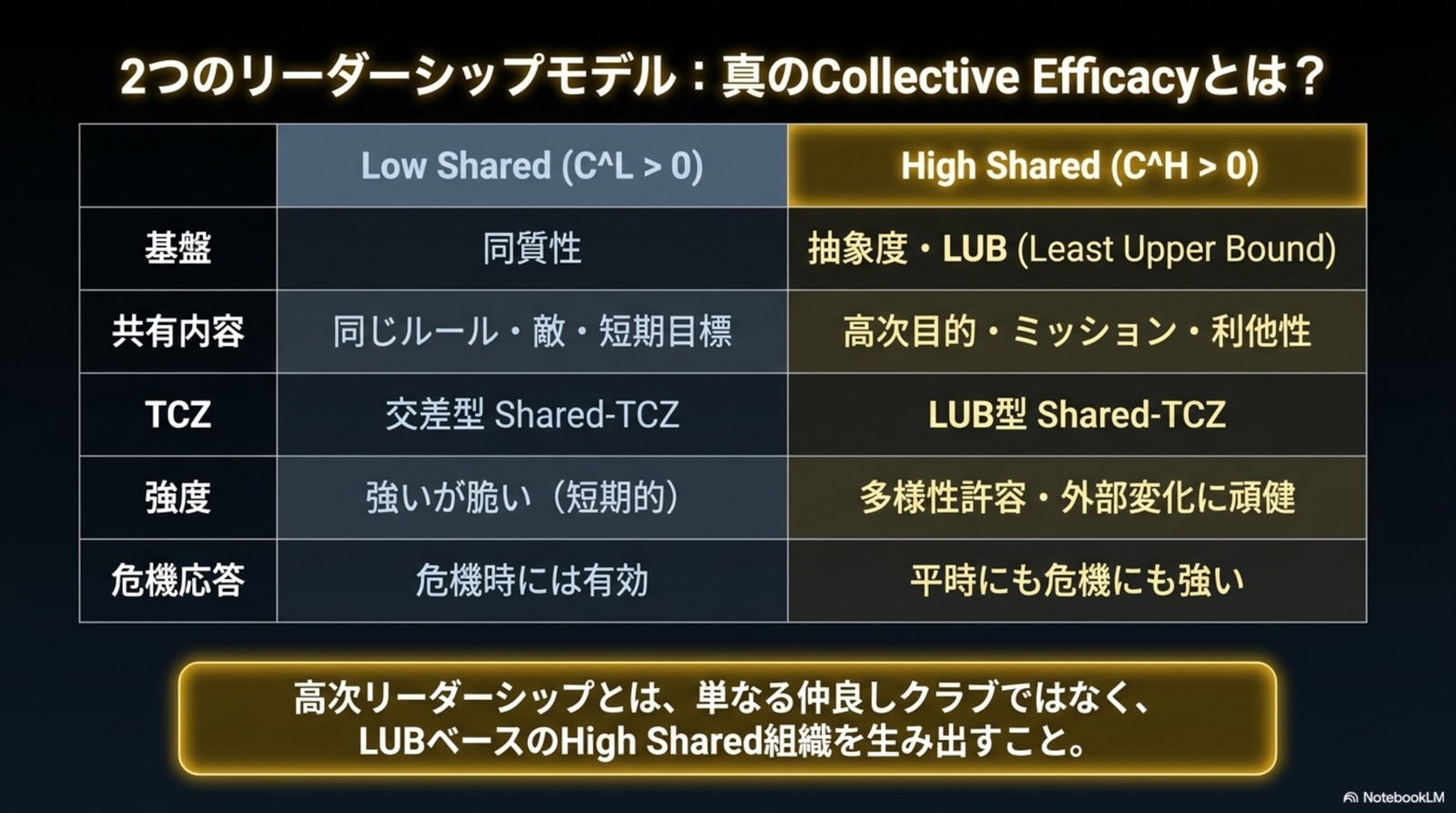
個人の Efficacy(T6A)を集合に拡張した最終定理。メンバー間の結合の質(CL/H:Low Shared = 同質性 / 敵 / 恐怖、High Shared = LUB / 志 / 利他)で集合動学が決定的に分岐する。これが T 理論的リーダーシップの数理的中核。

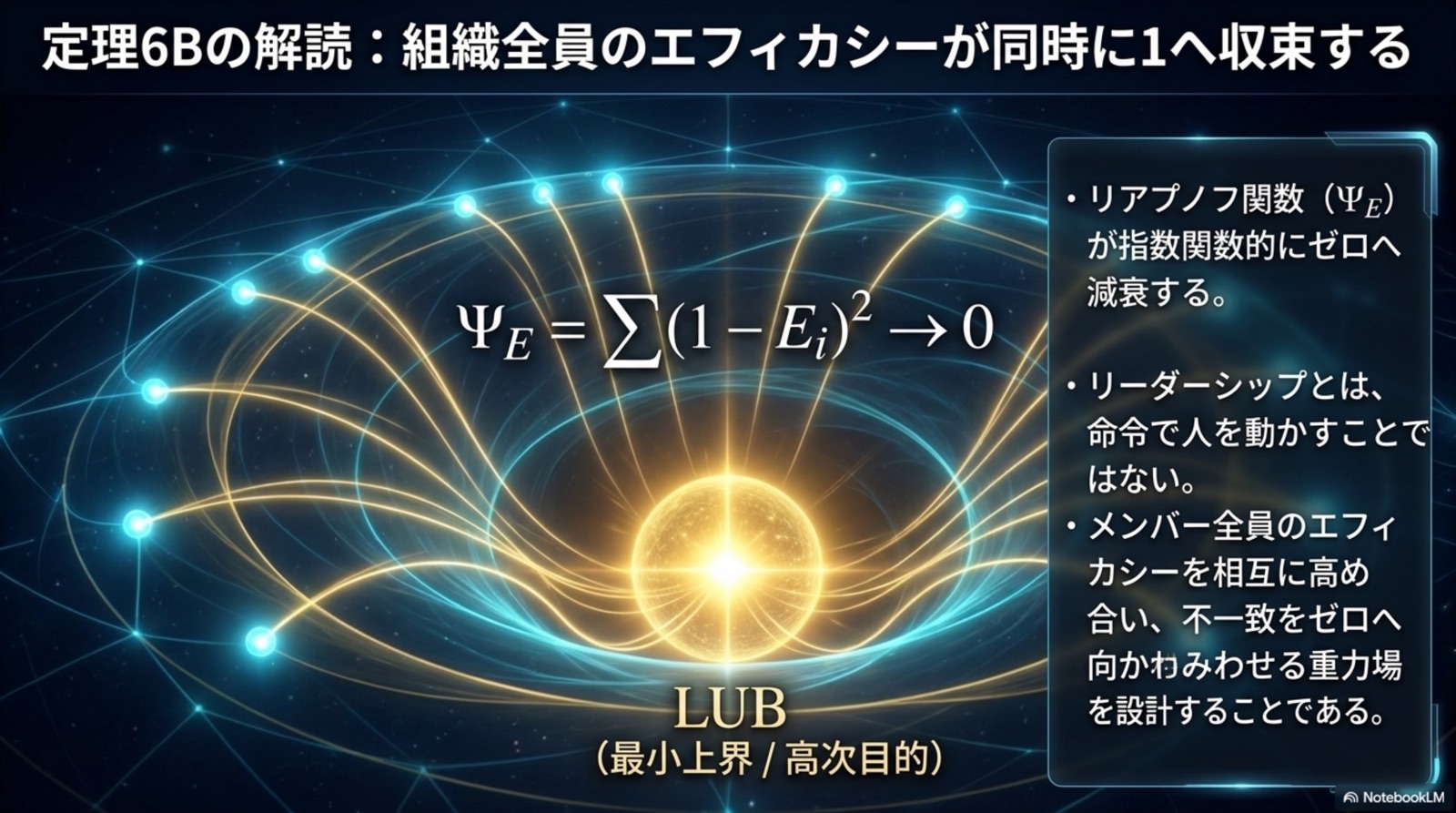
個人のエフィカシーで自分の人生を変えられても、組織の摩擦は解消できない。複数の主体が交差する時、空間の重力場はどう変化するのか ── これが定理 6B が答える問いである。
本章の核心は ── リーダーシップとは 命令で人を動かすこと ではない。それは 全員のエフィカシーを相互に高め合い、不一致をゼロへ向かわせる重力場の設計 である。「リーダー個人の能力」ではなく「集団の結合の質」を扱う数理として、6A を集合に拡張する。
これほど統一的な数理を扱うからこそ、最後に問われるのは ── この力を誰のために、どんな倫理制約のもとで使うのか、という設計者の責任である。エシックスは禁止ではなく、強力な認知ダイナミクスを クライアントの認知空間の安全保障 として運用する 解放 の条件である。
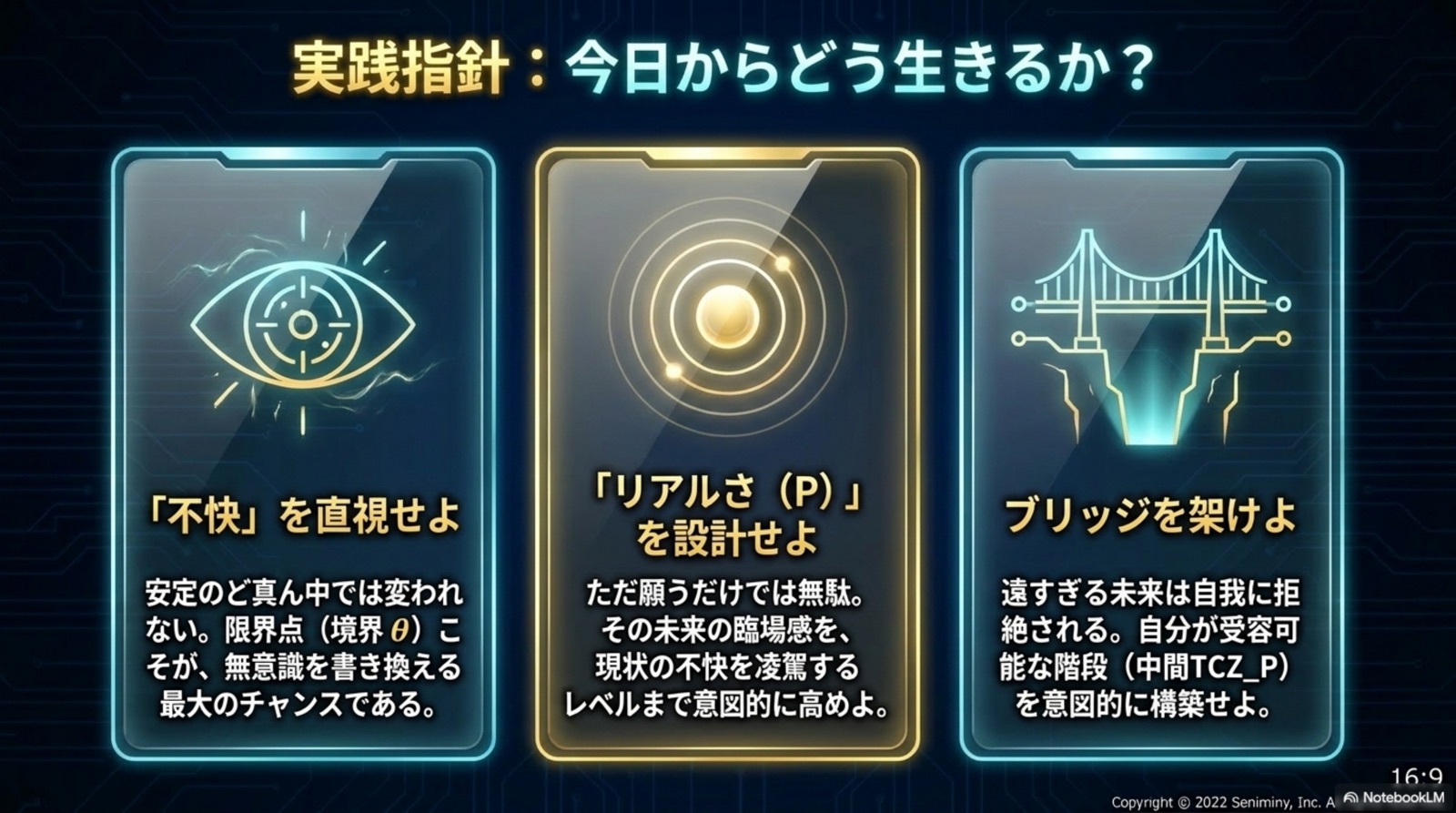
定理 1 は「人は必ず現状の谷(TCZ₀)に収束する」と言った。ならば問いは一つ ── どこへ谷を移すか。真のゴールは現状の快適ゾーンの外にあるが、外にあるだけでは足りない。
谷の外の一点でも、それが 他人から与えられた目標なら地形は動かない。自分発(Self由来)であること・正の価値を持つこと・そしてその価値を 臨場感で制御に変える力(λ > 0) ── この四条件が同時に満たされて初めて、現状の谷そのものが書き換わりはじめる。
そして真のゴールは遠いほど 見えにくく、言葉にしづらい。可視性は距離とともに急速に落ちる(exp(−dist²/σ²))。だからこそ「まだ言葉にできない遠さ」は、ゴールが偽物である証拠ではなく、本物である兆候でもある。
未来のゴール G を 終端条件として置くと、いまの最適な一手 u* が未来 G に依存して決まる。これが「未来が現在を決める」の厳密な意味 ── 物理的な逆因果でも引き寄せでもない、認知ダイナミクスの構造である。
方程式は終端(未来 G)から 時間をさかのぼって解かれる。いまの一手は、過去の積み重ねではなく 置いた未来から逆算されて決まる。これが「未来が現在を決める」の数理的な姿だ ── オカルトでも因果の逆転でもなく、最適制御の標準的な構造にすぎない。
過去そのものは変わらない。だがその 意味は G から再構成される。同じ出来事が、置いた未来によって「失敗」にも「準備」にもなる ── 「あれは準備だった」と言えるとき、人はすでに未来から時間を流しはじめている。
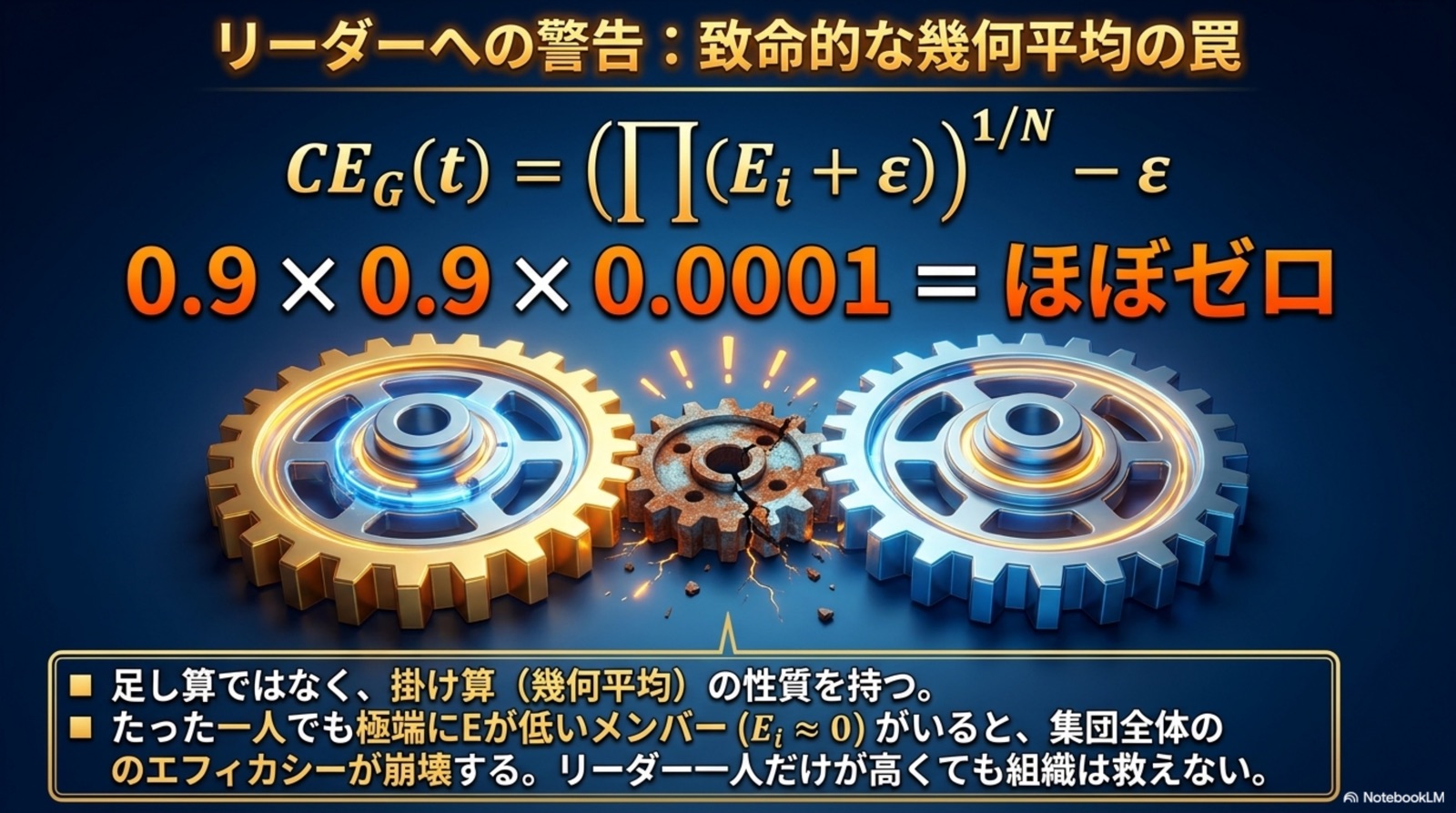
到達の定理。臨場感・価値・効力・自己整合性は 足し算ではなく掛け算で結ばれる。三つが満点でも一つがゼロなら積はゼロ ── 未達である。
だから「設定すれば叶う」は 数学的に偽である。臨場感を上げても、それが自己像と矛盾していれば(Cself = 0)積はゼロに落ちる。願望の強さは、欠けた一項を埋め合わせることができない ── 掛け算とはそういう構造だ。
代わりにこの式は、もっと実用的な問いを与える ── どの枠が欠けて届かないのか。臨場感か、接近価値か、効力か、自己整合性か。条件付き・反証可能なかたちで「いま足りない一項」を特定できる。これが「叶える」ではなく「届かせる」ための地図である。
物理時空は抽象度の束の 底 ── 最低抽象度への射影にすぎない、というモデル上の読み。各抽象層は固有の認知時間 τL(未来 LUB からの距離)を持ち、それぞれが収束する。
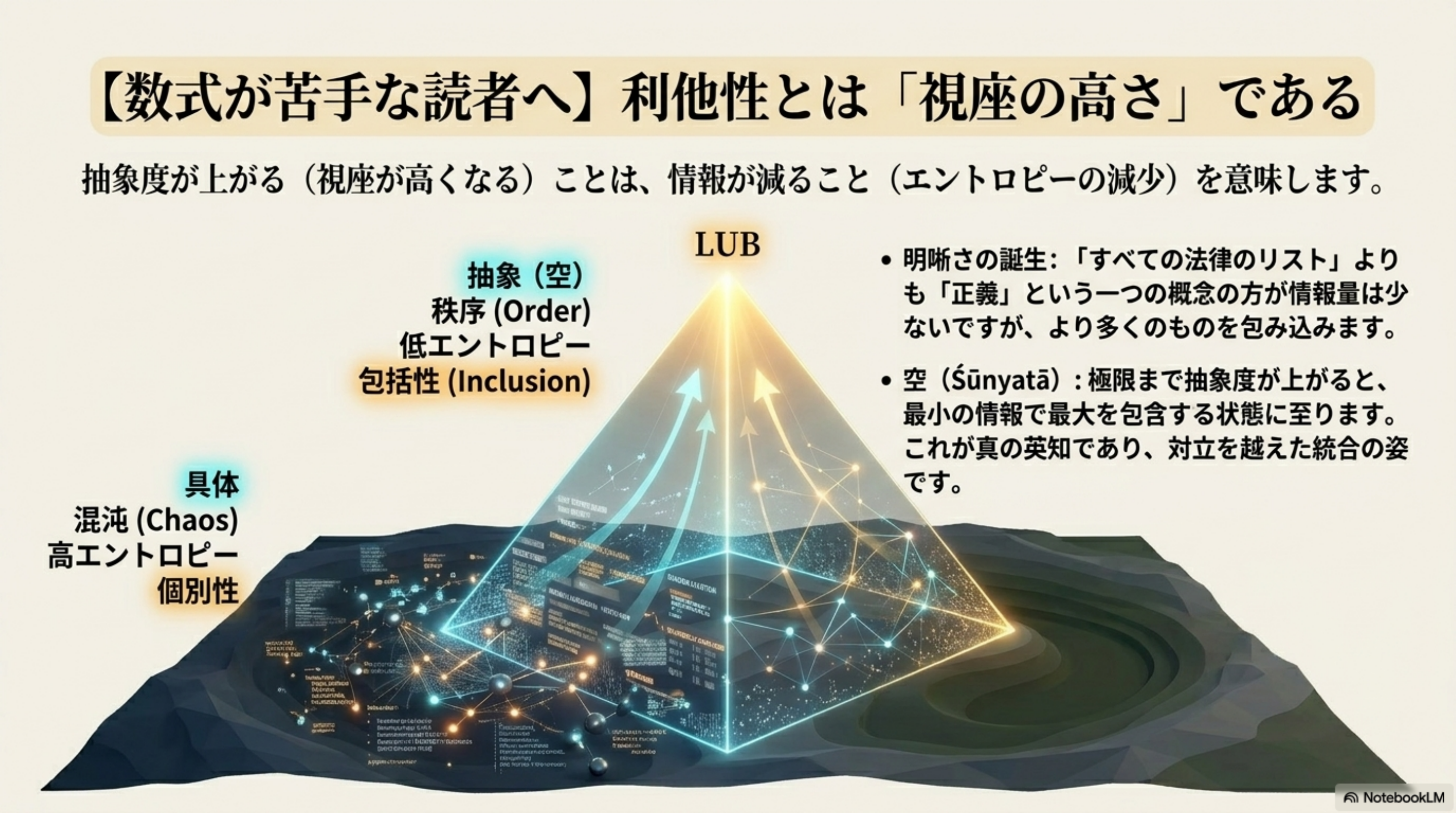
物理のエントロピーは増え続ける ── 部屋は散らかり、熱は拡散する。だが 高い抽象度の意味のもとでは、同じ出来事が一つの軌道へまとまっていく。散らかる宇宙と収束する宇宙は矛盾しない。見ている抽象度の層が違うだけだ。
抽象度が上がるほどランダム性は下がる ── これはあくまで このモデル/レンズ上の読みであって、物理的事実の断定ではない。低い層では偶然に見えるものが、高い層からは一本の意味の流れに見える。それが各層の固有時間 τL の正体だ。
芸術・音楽・物語・儀礼・法・神話は、概念のままでは誰も住めない高抽象の理想(LUB)を「住める共有現実」に変える 装置である。
抽象度の頂(LUB)は、言葉にした瞬間に痩せてしまう。そこに 象徴が架かる。見える化(像・旋律・物語)→ リアル化(儀礼・体験)→ 伝統化(継承・反復)── この三段の梯子をのぼることで、概念は「住める共有現実」に変わる。
これは 美術館モデル・継承の理論的土台でもある。ここで言う宗教や神話は、真理として断定されているのではない ── 見える化・リアル化・伝統化という機能の記述として置かれている。高い理想を一人の頭の中から、みなで立てる場所へ移すための機構である。
進化は過去環境への適応に尽きない、というモデル上の読み。高次の未来原点から「生きる能力」を選び取る ── 決して下がらない(逆リャプノフ)一方向の登攀として記述される。
この汎関数は決して下がらない(逆リャプノフ)。進化は 利他性・臨場感生成力・象徴文化力を最大化する方向へ、未来の理想から登りつづける一方向のプロセスとして描かれる。過去への適応だけでは説明されない「生きる能力の選び取り」がここにある。
だから 利他性は進化への矛盾ではなく、高抽象における進化そのものだ ── 「魚は陸に上がりたいと思って上がった」。比喩は乱暴に聞こえるが、要点は方向性にある。あくまで このモデル上の読みであって、生物学的事実の断定ではない。
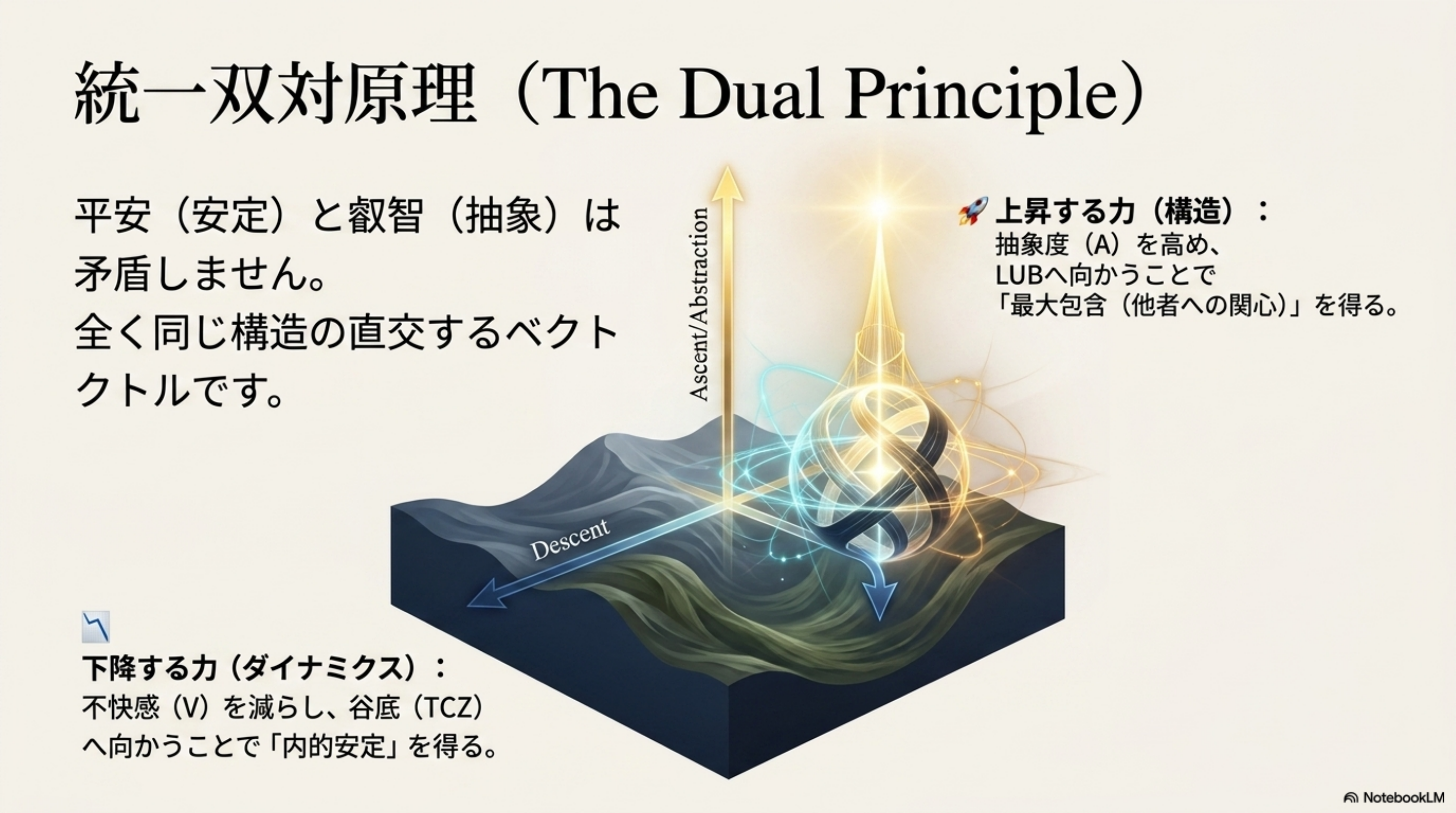
下降する力(ダイナミクス)は不快感 V を減らし、谷底 TCZ へ向かうことで「内的安定」を得る。上昇する力(構造)は抽象度 A を高め、LUB へ向かうことで「最大包含(他者への関心)」を得る。両者は同じ構造の直交するベクトル。
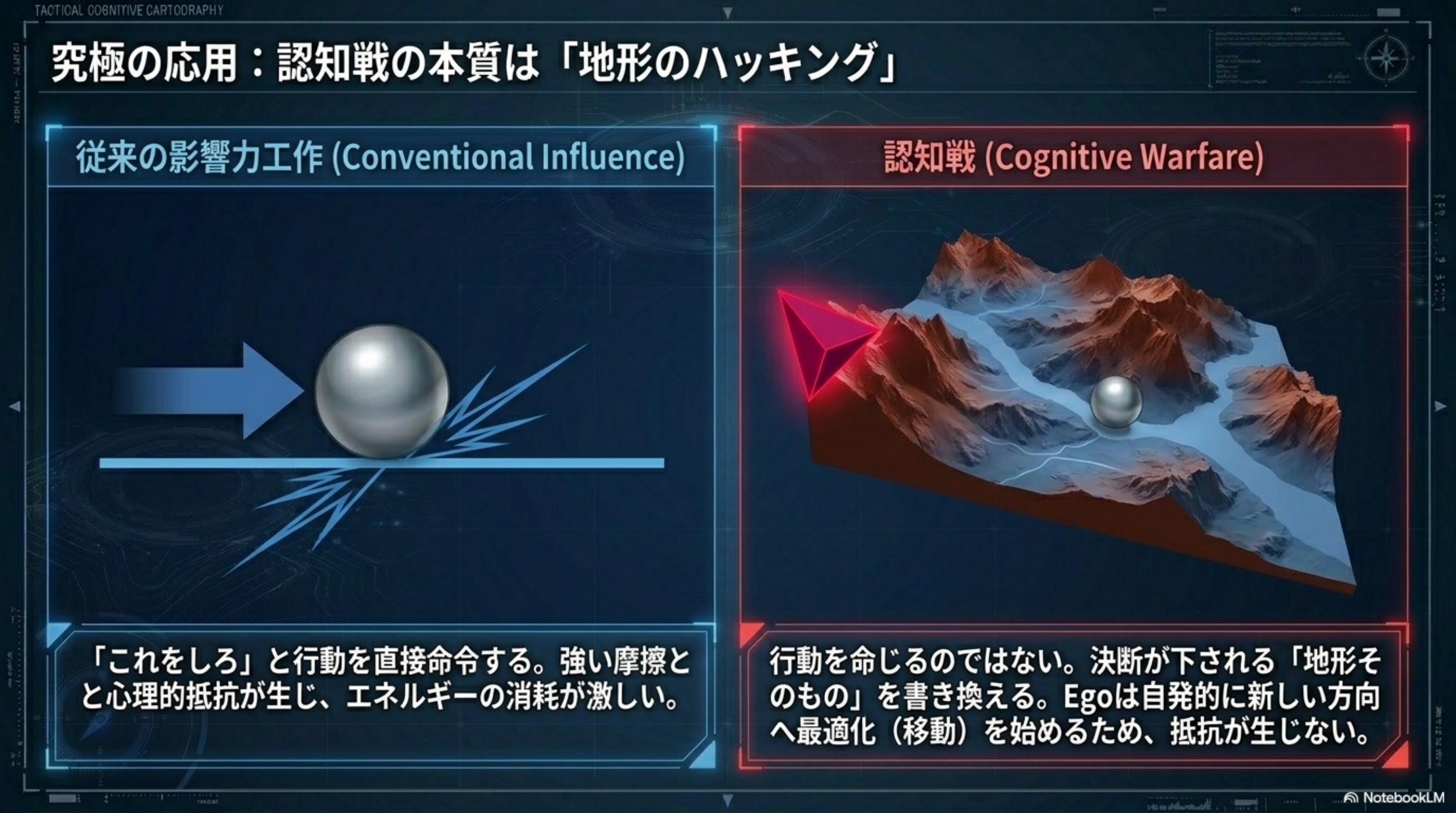
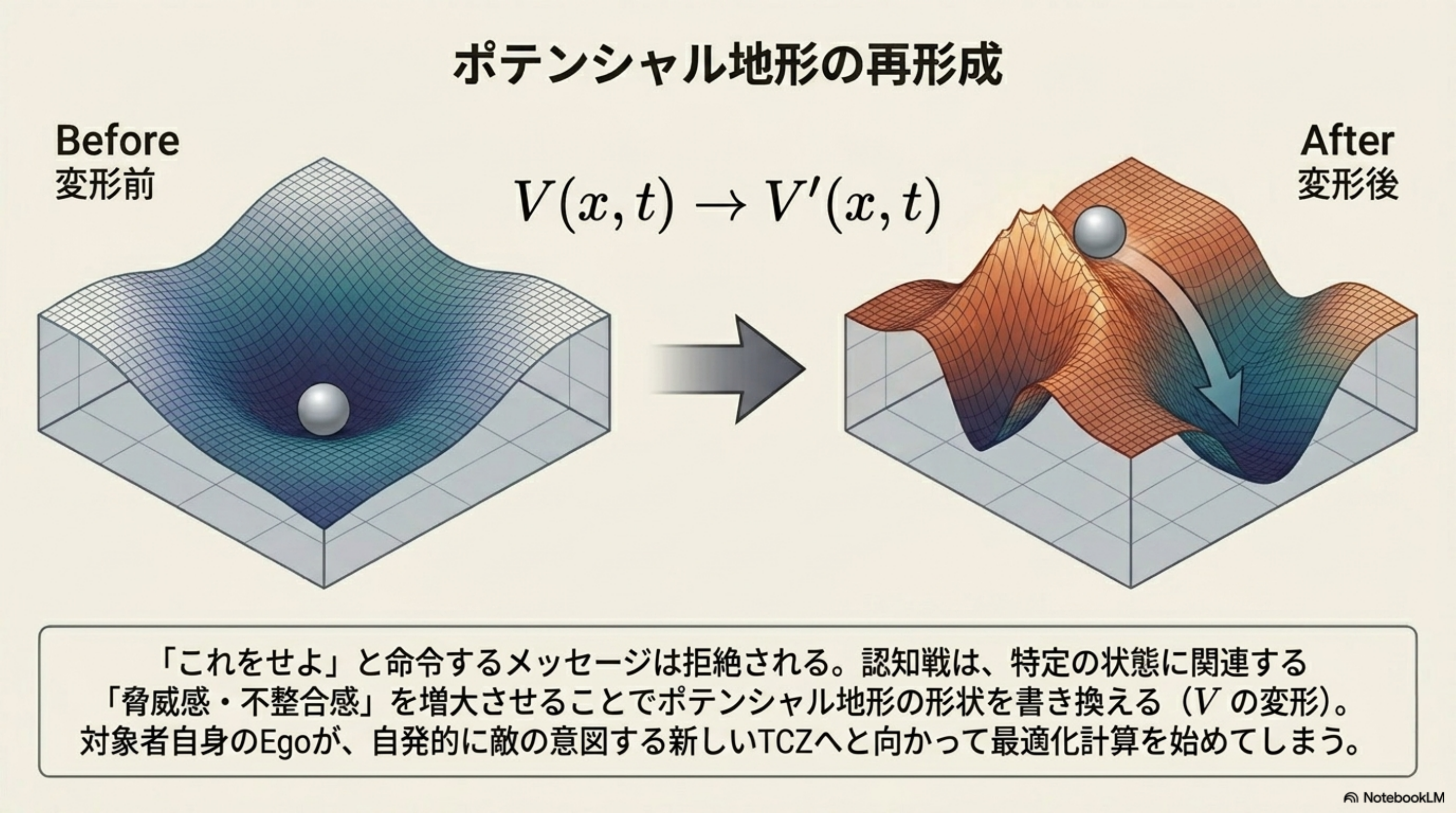
「これをしろ」と命令する従来の影響力は、強い摩擦と心理的抵抗を生む。認知戦は対象に一切触れない。代わりに、対象が「安全」と感じる評価構造そのものを変形させる。Ego は自発的に新しい偽の TCZ へと喜んで向かう。
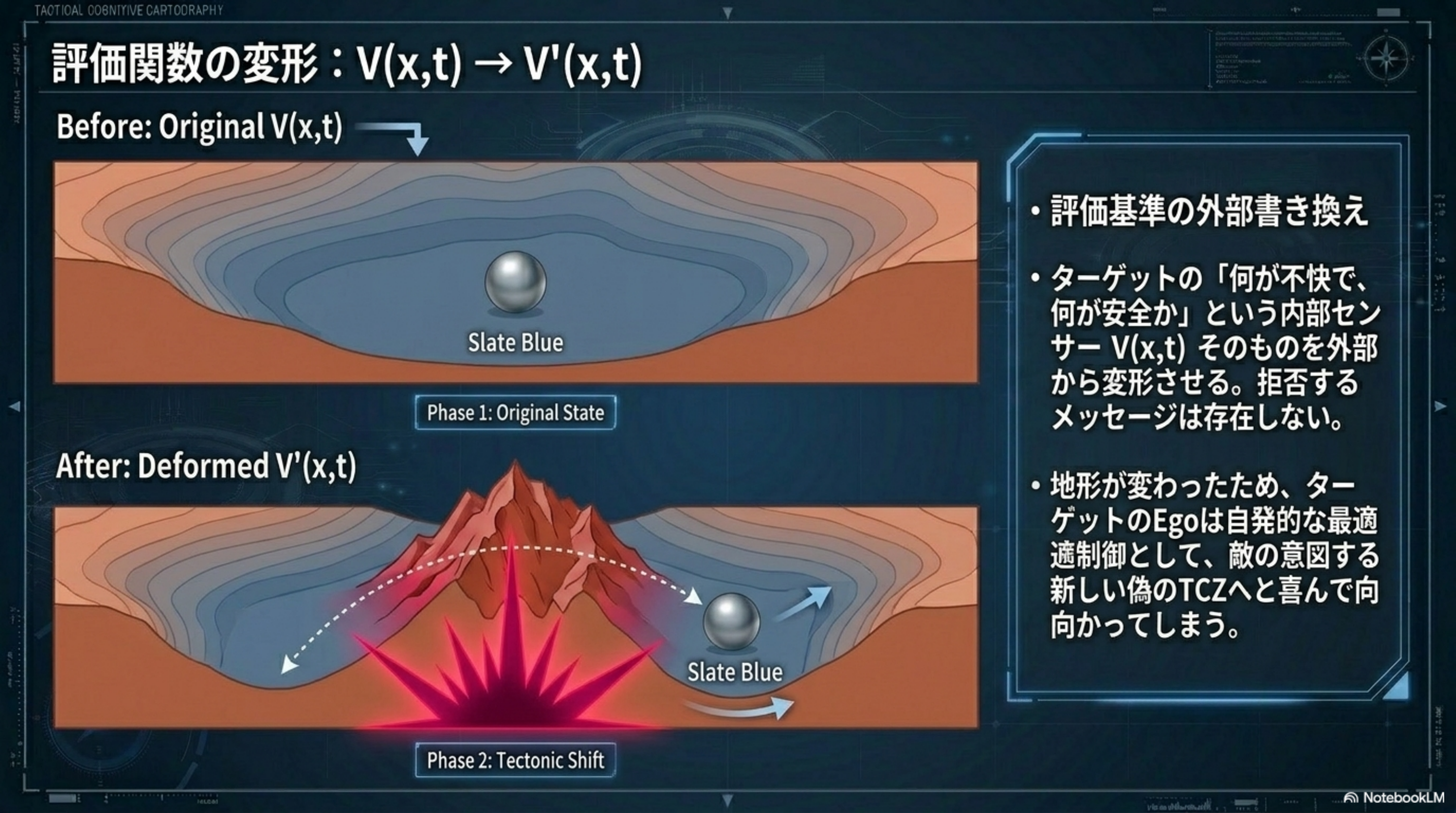
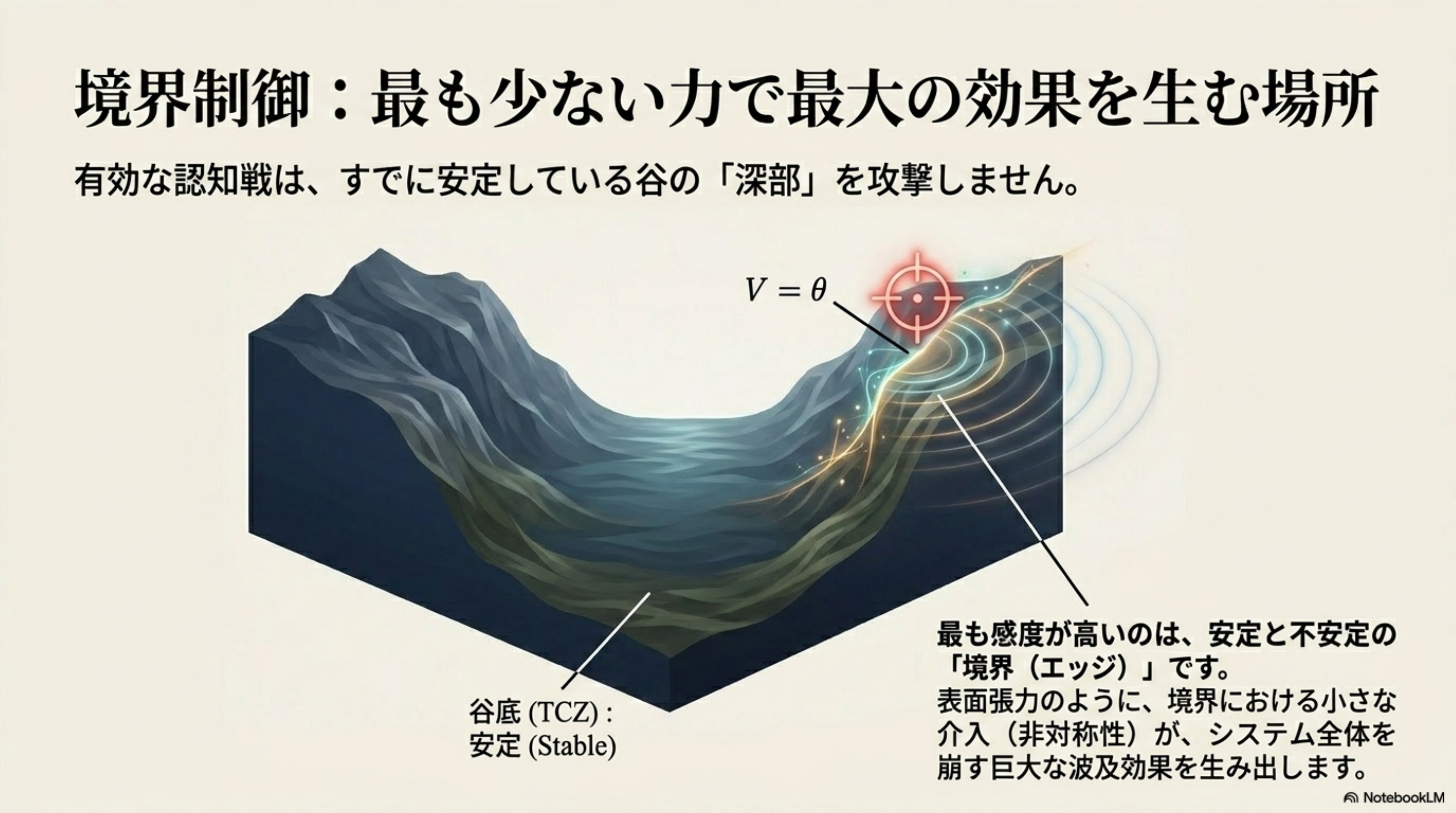
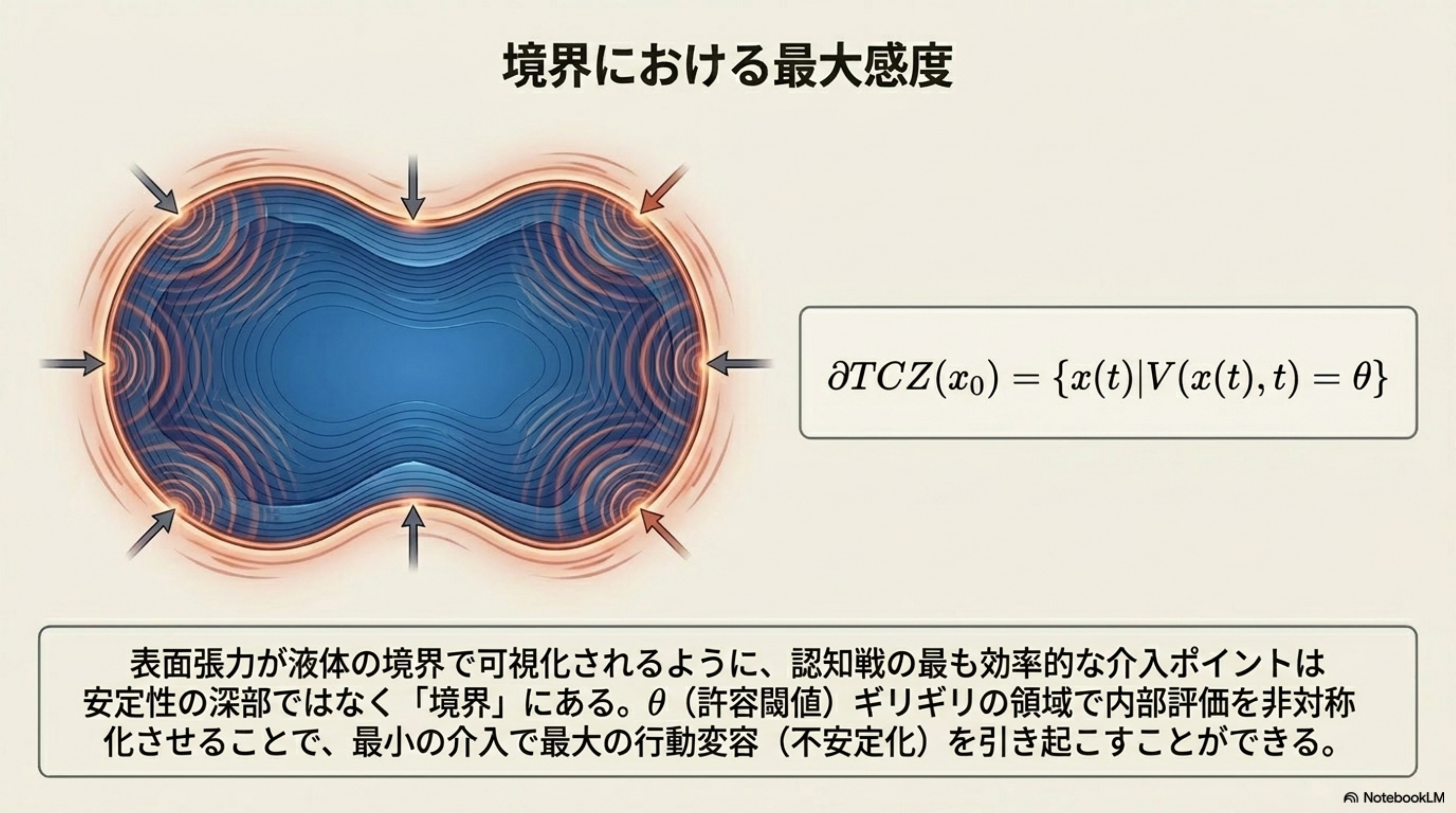
有効な認知戦は、すでに安定している谷の「深部」を攻撃しない。最も感度が高いのは、安定と不安定の「境界(エッジ)」。表面張力のように、境界における小さな介入(非対称性)が、システム全体を崩す巨大な波及効果を生み出す。

操作と解放は同じ最適化問題で、目的関数だけが反転する。
その反転を保証するのは、構造の中に組み込まれた倫理 4 条件と、組織内での運用実装としての TCE 規律。
Ethic を最小化することは「禁止」ではなく「解放」である。
クライアントは判断に必要な情報を完全に持っている
クライアントは強制ではなく自由意思で同意している
短期的便益ではなくクライアントの長期利益を優先する
クライアントの自律性を侵害せず、より高次へ引き上げる方向へ
AI の出力は本質的に「谷底の探索(局所解)」に過ぎない。損失関数の勾配を下り、ランダムな谷(時に幻覚)に落ち着く。芸術・真の知性は谷底ではなく、未発見の最小上界(LUB)を構造的に実現する高度な抽象作業。これを混同することは戦略的リスク。

ここまで 8 定理 + 認知戦 + 境界制御 + 倫理を見てきた。
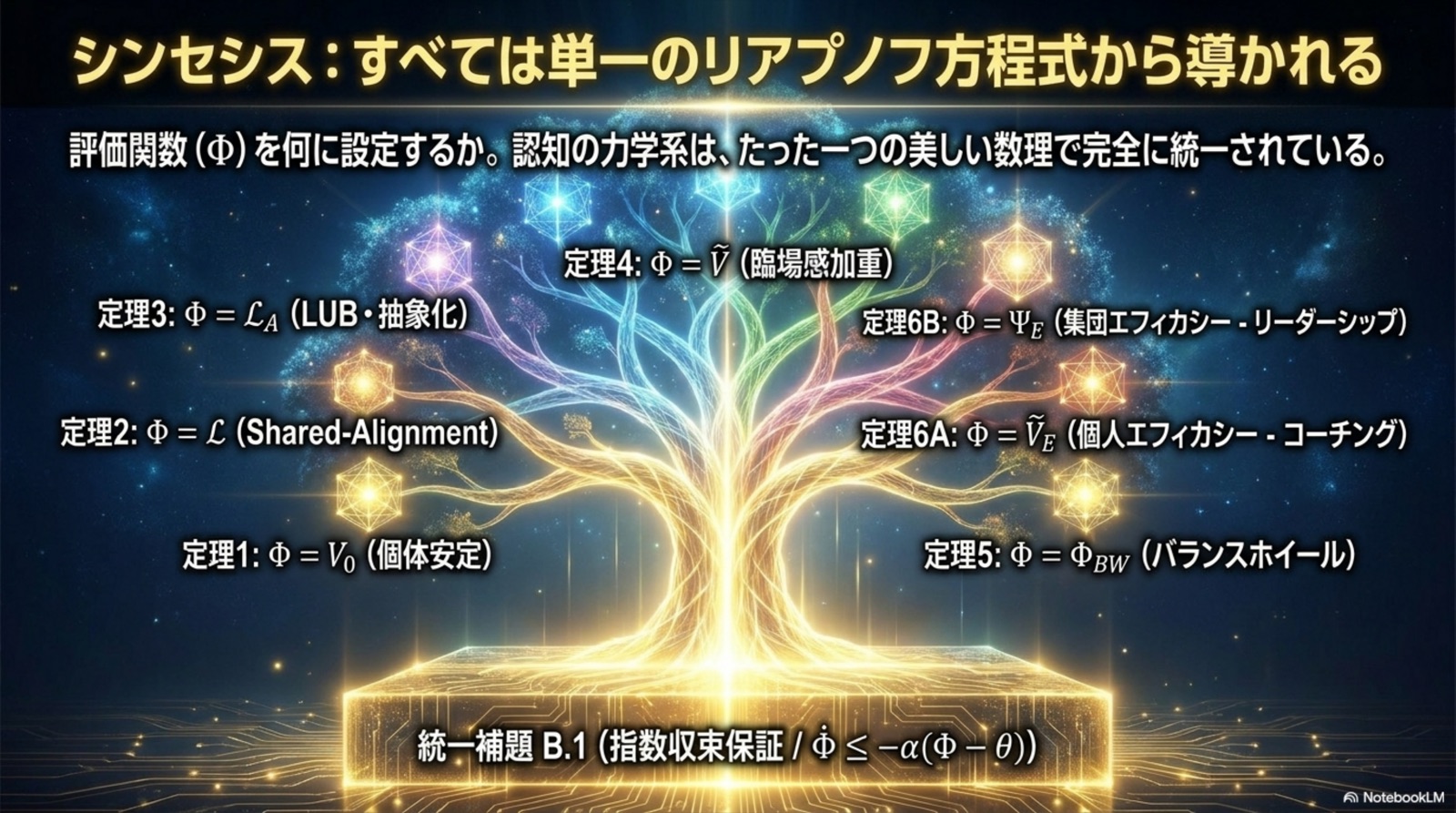
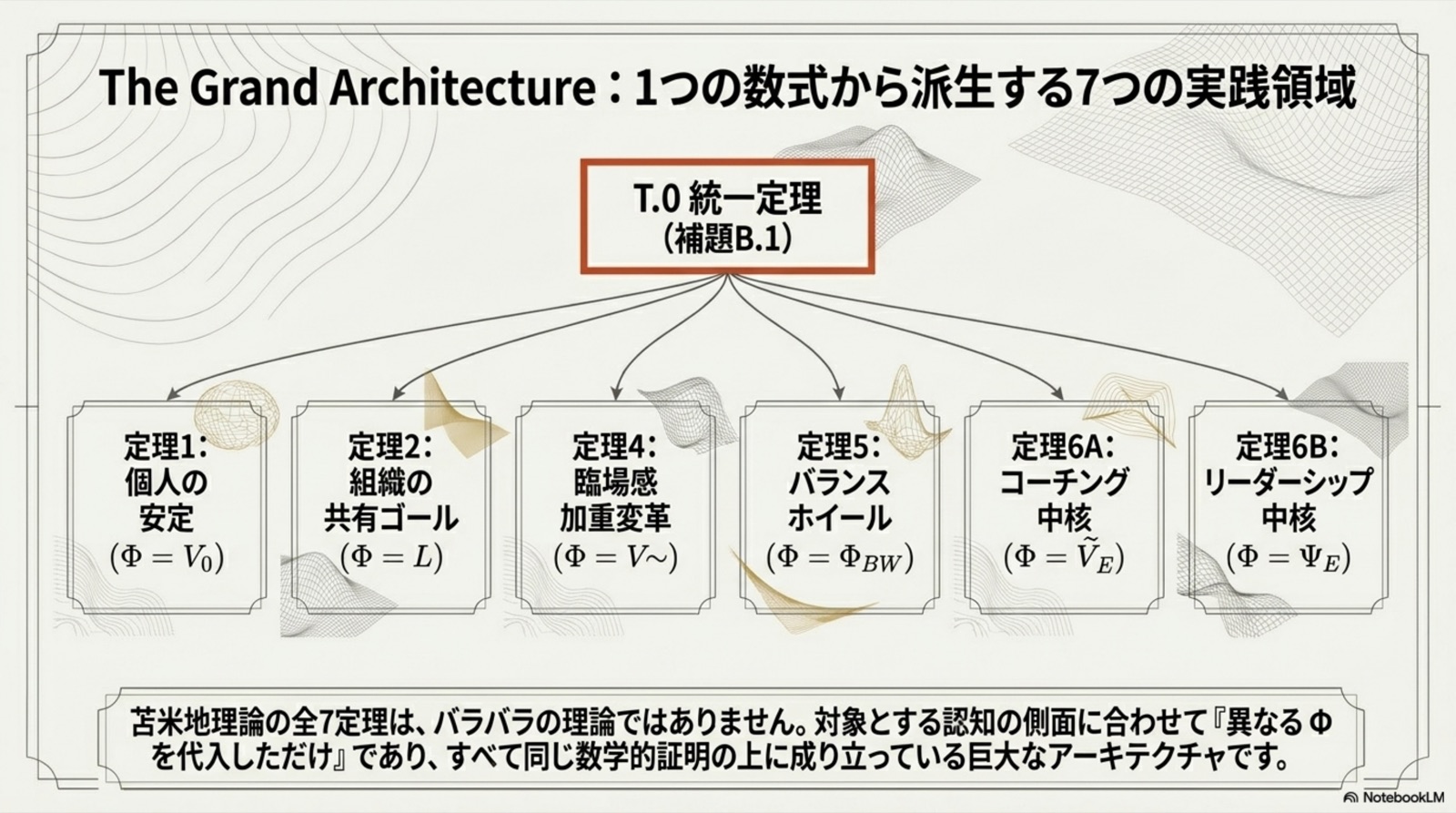
実は ── これら全部の収束機構は、たったひとつの不等式から派生する。
「Lyapunov 関数 Φ を差し替えるだけ」。骨格(B.1)は完全に共通(確定/仮説の階層)。

ここに辿り着いた読者は、定理 1 の個体収束から定理 6B の集団エフィカシーまで、一見まったく違う 8 つの動学を見てきた。個人 / 社会 / 抽象 / 臨場感 / バランス / コーチング / リーダーシップ ── 領域も対象もばらばらに見える。
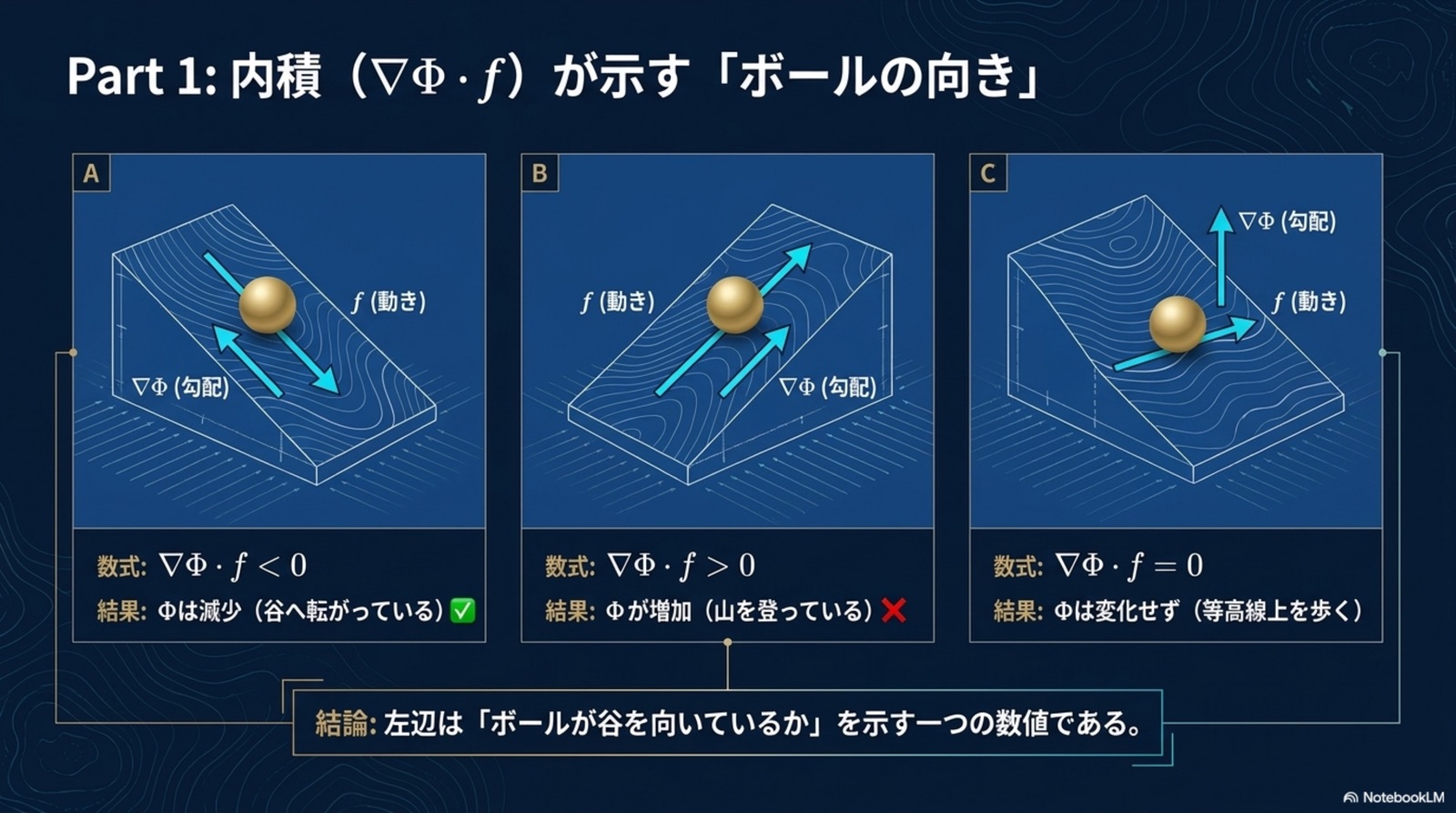
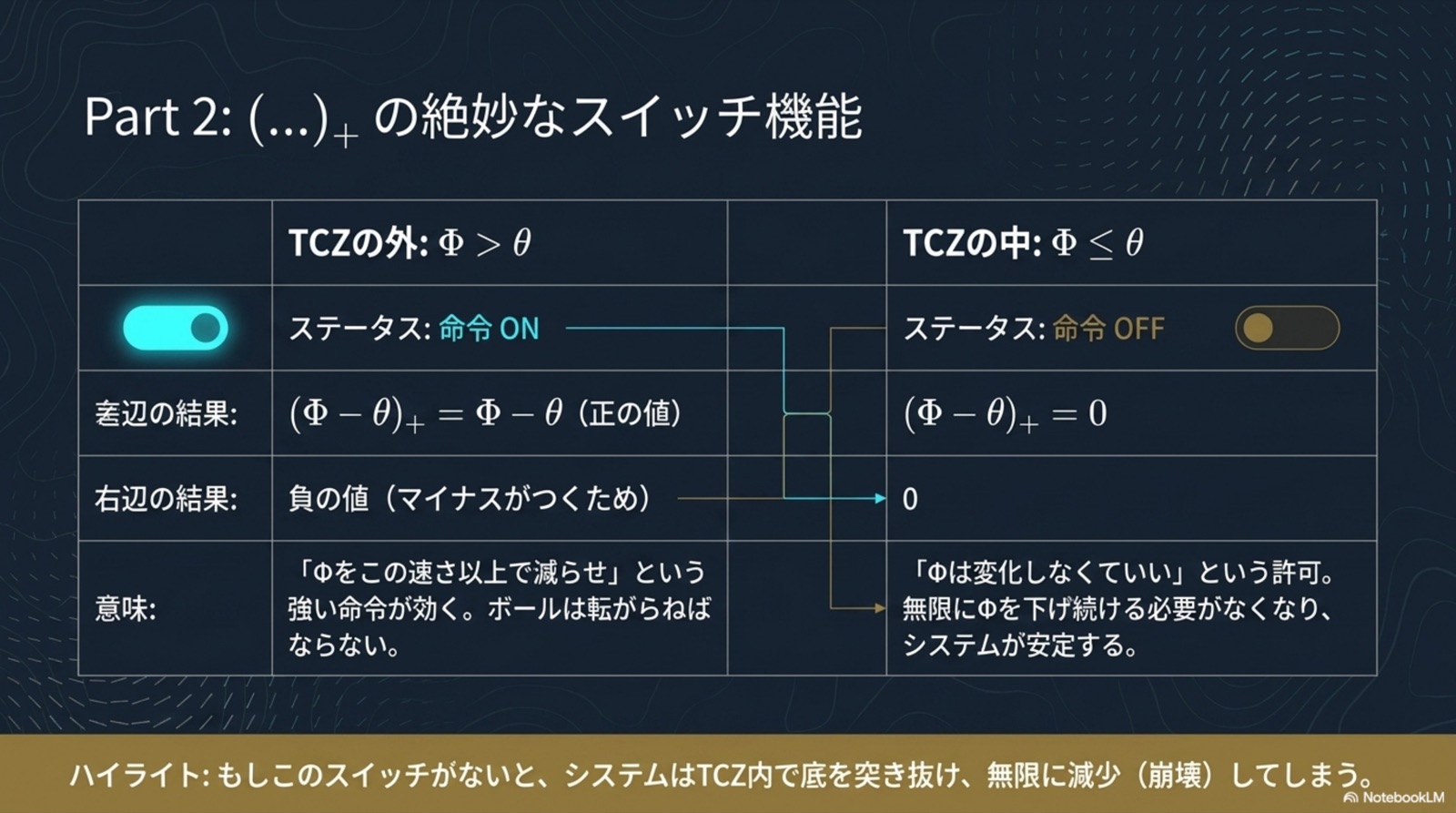
しかし数学の本当の美しさは、ここから始まる。8 つの定理が、たった 1 行のマスターキー ── ∇Φ · f ≤ −α(Φ − θ)+ ── を満たす形で派生する。これは 1 つの原理の 8 つの顔 である(確定 / 仮説の階層は こちら)。
マスターキーの本当の威力は ── Φ の中身を差し替えるだけで、定理 1 から 6B までが派生する という事実にある。証明とは、対象領域に合わせて Φ を再定義し、この不等式が成立することを確認する作業 に過ぎない。
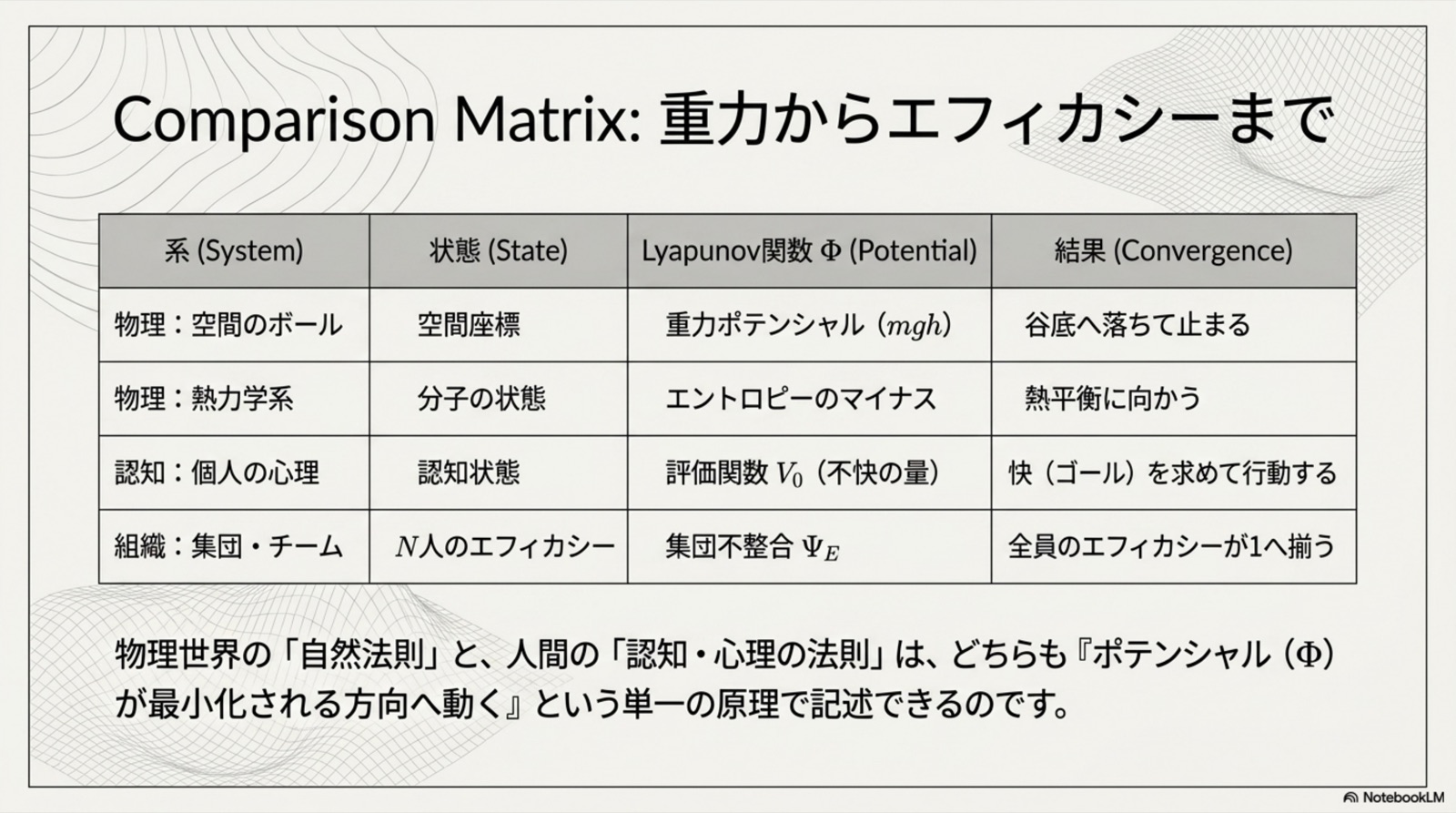
同じ B.1 補題を 「Mathematics of Guaranteed Stability」(別 NotebookLM 解説デッキ)では、別の角度から解剖する ── 体温計(複雑系を 1 数値で測る)/ ポテンシャル系(物理と認知の同型エンジン)/ Comparison Matrix(重力 → エントロピー → V₀ → Ψ_E)。
本編は「8 定理の物語」を語る。さらに学びたい人は、目的に合わせた 2 つの独立タブで深掘りできる。
・式の学習(統合ハブ):数学初心者向け → 全体地図 → 各定理の式を一行ずつ読み下す ── 3 段階を 1 ページに統合
・統一証明の解剖:B.1 補題から 8 定理が派生する 5 ステップを一段ずつ解剖

ここまで読み解いた認知の力学系を、各定理 1 枚のカードで振り返る。
すべては B.1 補題 に異なる Φ を代入した特殊化 ── これが 1 つの原理の 8 つの顔(確定/仮説の階層)。
Self / Ego / TCZ の 三言語の同型化。すべての定理の根本に位置する基底動学。
Ego は哲学概念ではなく 累積不快を最小化する制御器。「考えて選ぶ」のではなく自動で計算する。
他者とのズレ γij Sij がゴム紐として作用し、集団は「共有の谷」へ収束する。
横の結合(γS)に縦の上昇(ηA)を足す。マンデラ・ガンジー・キング牧師は「共有する高次目的」で歴史を動かした。
人は不快を避けるだけでなく リアルに感じる安定世界 へ向かう。「強く願う」だけでは動かない(P, Q AND 必須)。
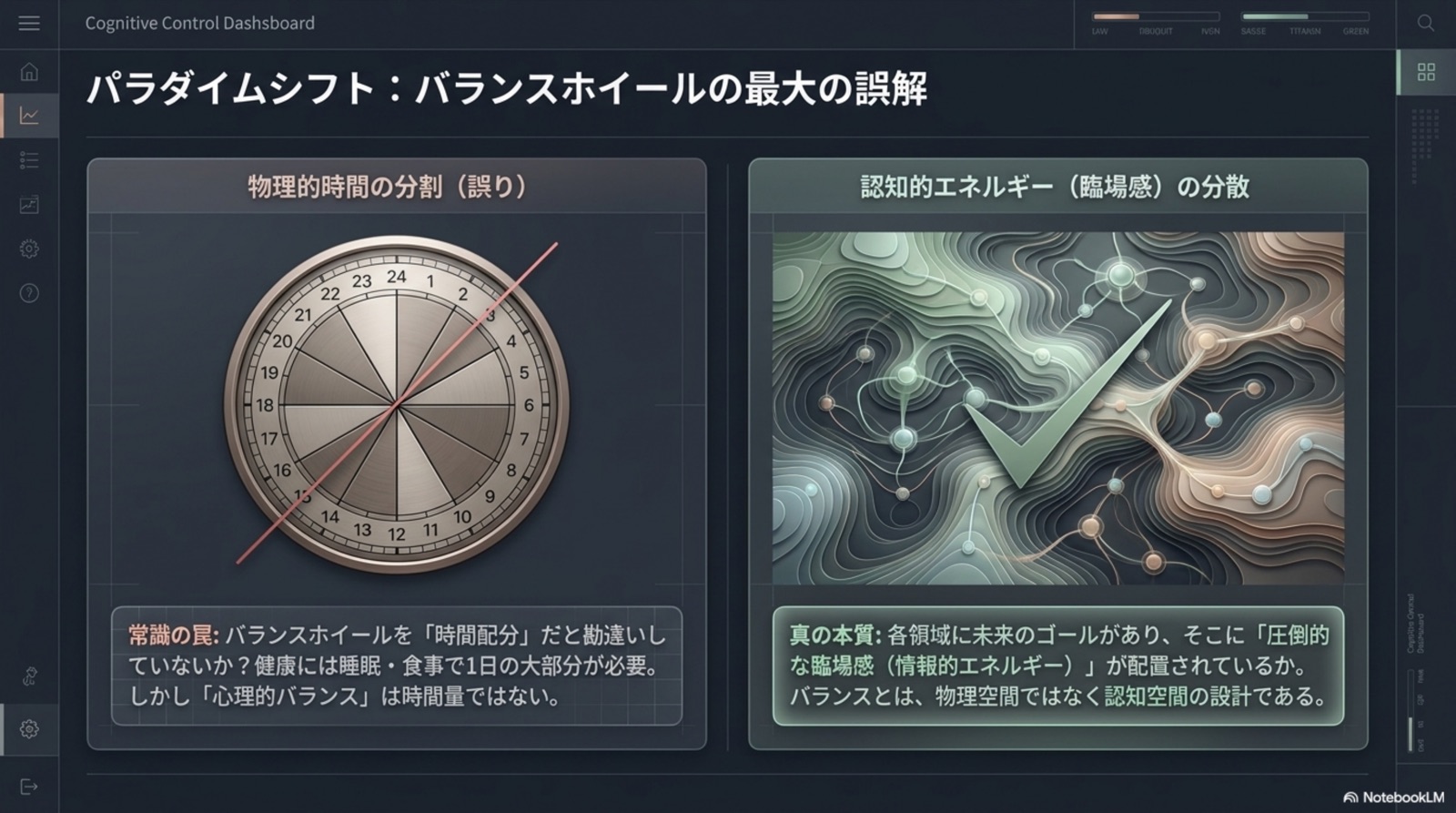
バランスは時間配分ではなく 認知エネルギー(臨場感)の分散。4 条件 ALL ZERO で真の安定。
P × Q × E の積で実効ポテンシャルが決まる。コーチが介入できる 唯一の軸 = E。接近項にだけ E が乗る。
命令で人を動かすことではない。全員のエフィカシーを 相互に高め合う重力場の設計。High Shared 必須。
すべての介入と問いは ── ① Φ を選ぶ ② Φ を下げる方向に f を揃える ③ α を大きくする ── この 3 つに帰着する。
証明とは、対象領域に合わせて Φ を再定義し、この不等式が成立することを確認する作業に過ぎない。
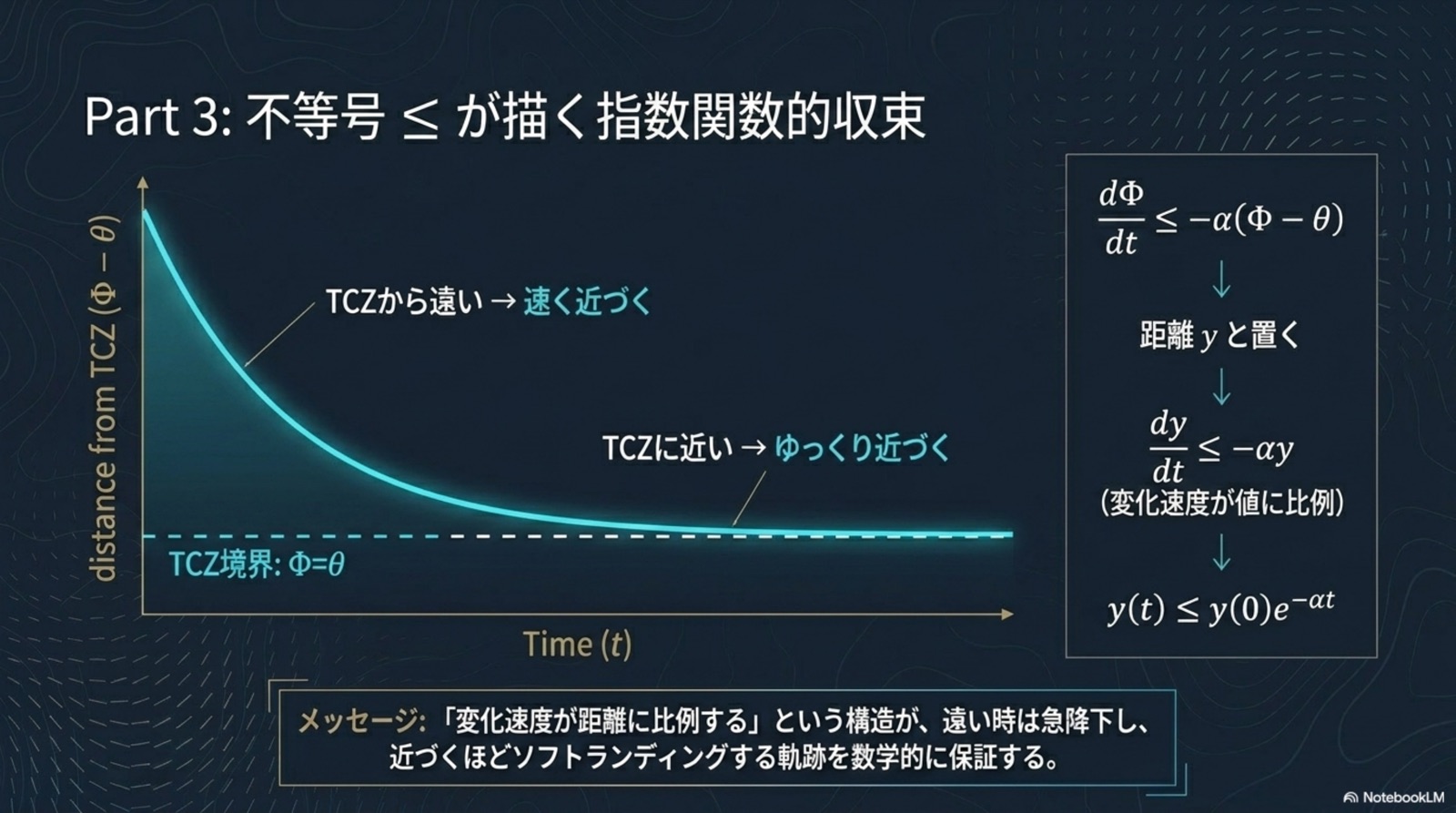
本サイトで紹介した 8 定理のうち、定理 1 ・定理 2 ・定理 3 ・定理 4 の 4 定理は、本人(苫米地英人)が公開講義 TCE Day 2(2026-05-06)の B.5 比較定理(p.240) で、すべて完全に同じ form ── `Φ−θ ≤ (Φ(x₀)−θ)·exp(−αt)` ── を共有することが 形式証明済み。これは確定事実。
一方、T.0 ・定理 5 ・定理 6A ・定理 6B の 4 定理については、同じ B.1 統一補題の機構へ帰着するという 整理が handbook §12.3(編者層)で示されているものの、各定理について B.1 前提条件(P0〜P4)の明示的検証を完全に展開した本人による形式証明は、現時点で公開されていない。つまりこの 4 定理については「同じ機構へ帰着しうる」という 拡張仮説の段階にある。
したがって「8 定理がすべて B.1 補題の特殊化である」という主張は、確定事実(T.1〜T.4)と拡張仮説(T.0/T.5/T.6A/T.6B)が混在した整理である。本サイトの俯瞰図に付された 確定 / 仮説 バッジは、この二層を区別するためのもの。詳細は formulas.html §3.5 拡張仮説セクション を参照。
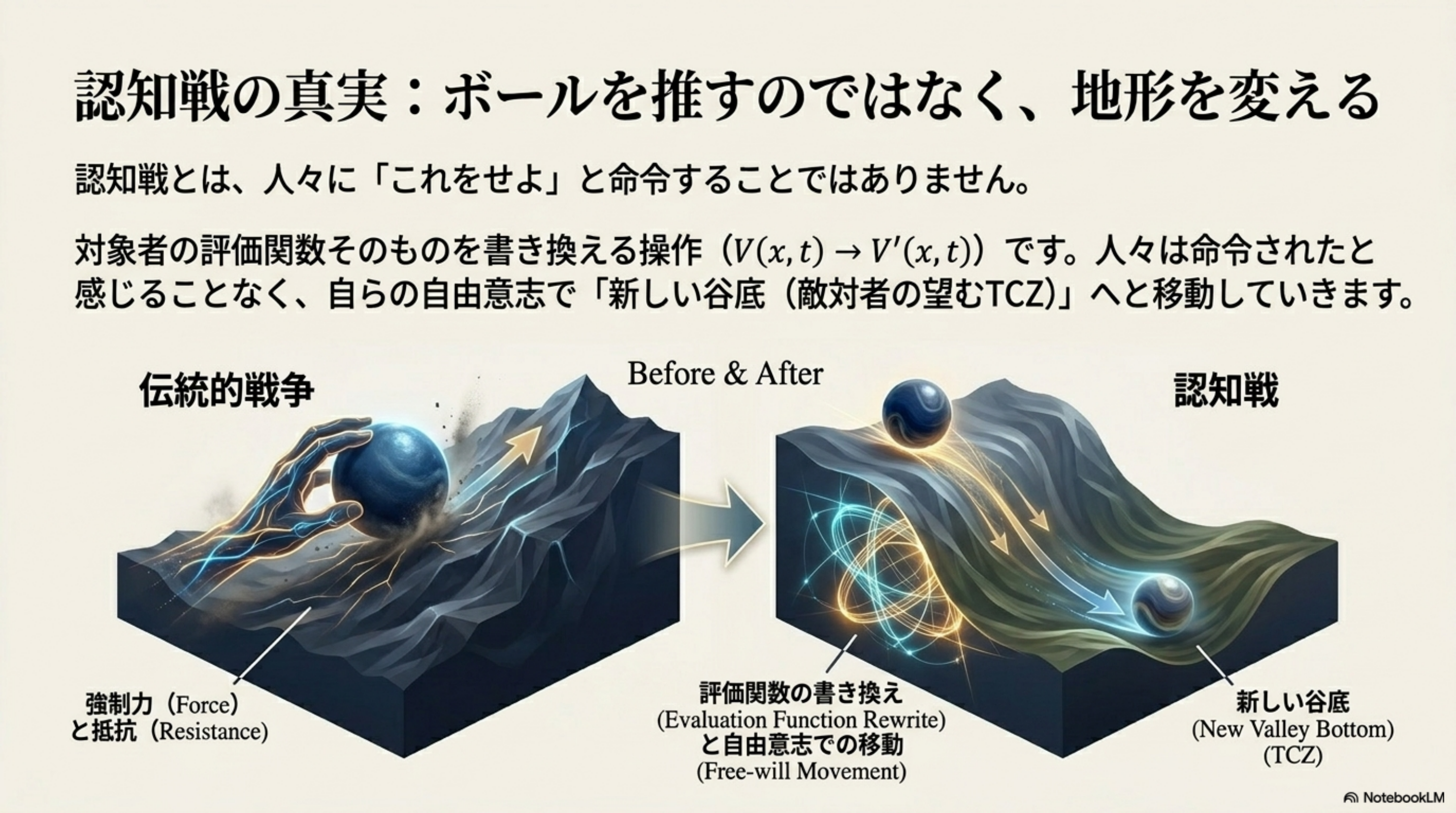
行動を直接コントロールしようとする時代は終わった。これからのリーダー、戦略家、教育者に求められるのは、人々の行動を生成する「基盤構造(ポテンシャル地形)」そのものを設計し、より高い抽象(LUB)へと人々を導くこと。真の安定は、対立を越えた高い視座(空)からのみ生まれる。
評価関数を書き換え、個人の行動軌道を新しい谷へ誘導する。
低次の共有空間に閉じ込め、分断と不安定を増幅させる(攻撃的利用)。
抽象度を高め、距離を超えた統合と安定を実現する(防衛・芸術的利用)。


本サイト Cognitive Mindscape は同じ 13 定理体系を インタラクティブな体感装置 として実装しています(SVG シミュレーション主体)。
一方、姉妹サイト TCZ Explained は同じ理論を 順番通りに学べる教科書 として構成しました ── 原典順 12 章 / 初級 9 章 / 中級 9 章 / 上級 9 章。
両サイトは数式・voice・出典を完全に統一しており、好きな方から入れます。